ミニぷぱ2 Proの組み立て
※ 一般的なDIYプロセス:
組み立て --> キャリブレーション --> 実行
※ 注意:
MCU(ESP32とAT32)ソフトウェアは両方とも事前にインストールされているため、MCUイメージをフラッシュする必要はありません。
サーボ番号はハードウェア設計で固定されているため、ミニぷぱ2のように各サーボ番号を設定する必要はありません。ガイドに従ってサーボを正しい位置に配置してください。
参考のためにミニぷぱ2 Fusion 360 CADモデルを参照してください: https://a360.co/485n8mP
1. プリビルドイメージをmicroSDに書き込む
工具
キットに含まれている工具に加えて、以下のものが組み立てに必要です。
USBキーボード
USBマウス
PC
microSDカードリーダー
HDMIディスプレイ
micro HDMIケーブル
USB充電器
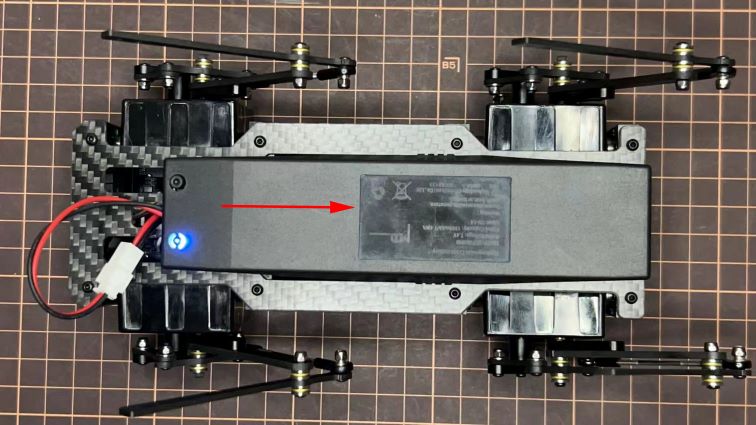
Step 1.1 バッテリーの充電
バッテリーはUSB経由で充電します。USB端子は写真を参照してください。ミニぷぱ本体に取り付けた状態でも充電できます。
※ LEDライト:緑色は十分な電力があることを示し、赤色は充電が必要なことを示します。
※ 5V/1Aのアダプターを推奨します。5V/2Aのアダプターを使用した場合、バッテリーICが1Aに変換します。80%充電するのに約1時間かかり、ライトが緑色になります。100%まで充電するにはさらに1時間かかりますが、ライトが緑色になれば使用可能です。

Step 1.2 イメージのダウンロード
プリビルドイメージファイルは Mini Pupperプリビルドイメージ からダウンロードできます。
※ “v2Pro_stanford**.img” means the image is for Ubuntu 22.04 version.
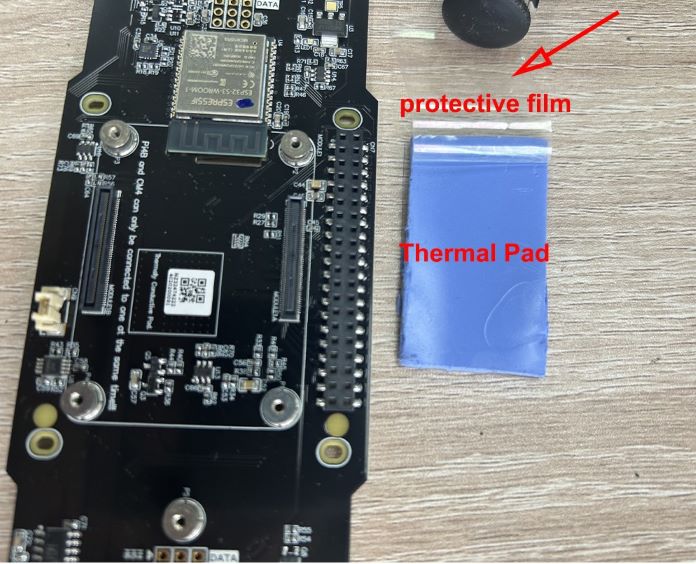
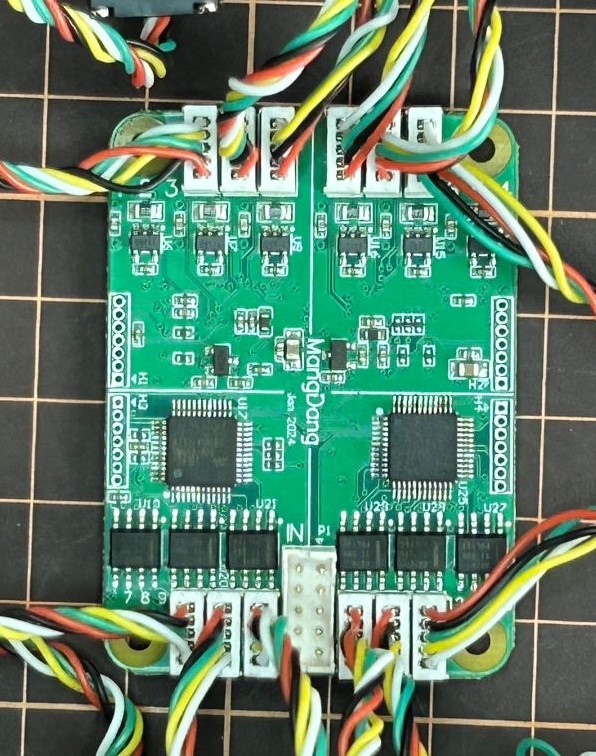
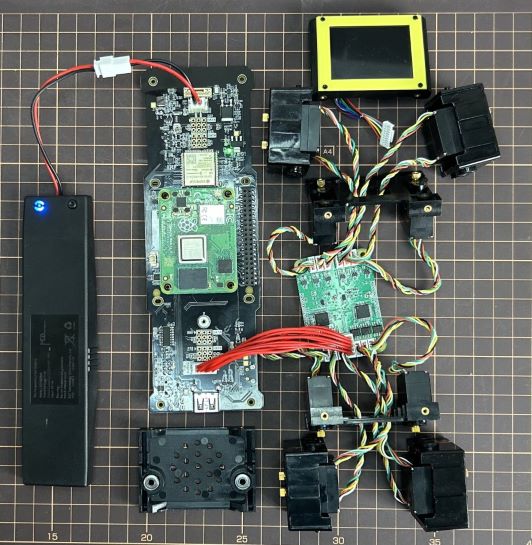
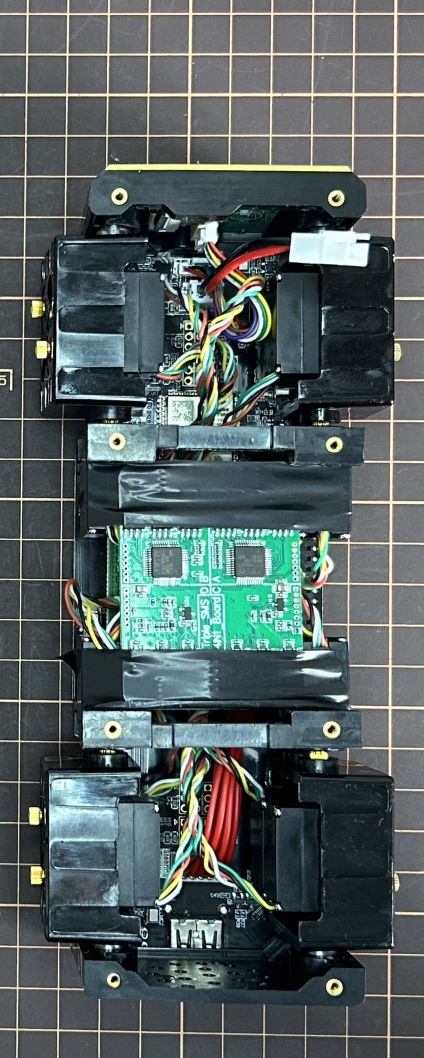
以下はPCB基板の写真です。

Step 1.3 イメージをmicroSDカードに書き込む
microSDカードをPCのSDカードリーダーに挿入し、イメージを書き込みます。簡単で信頼性の高いイメージ作成ツールとして、balenaEtcherまたはWin32DiskImagerを推奨します。完了までしばらく時間がかかります。
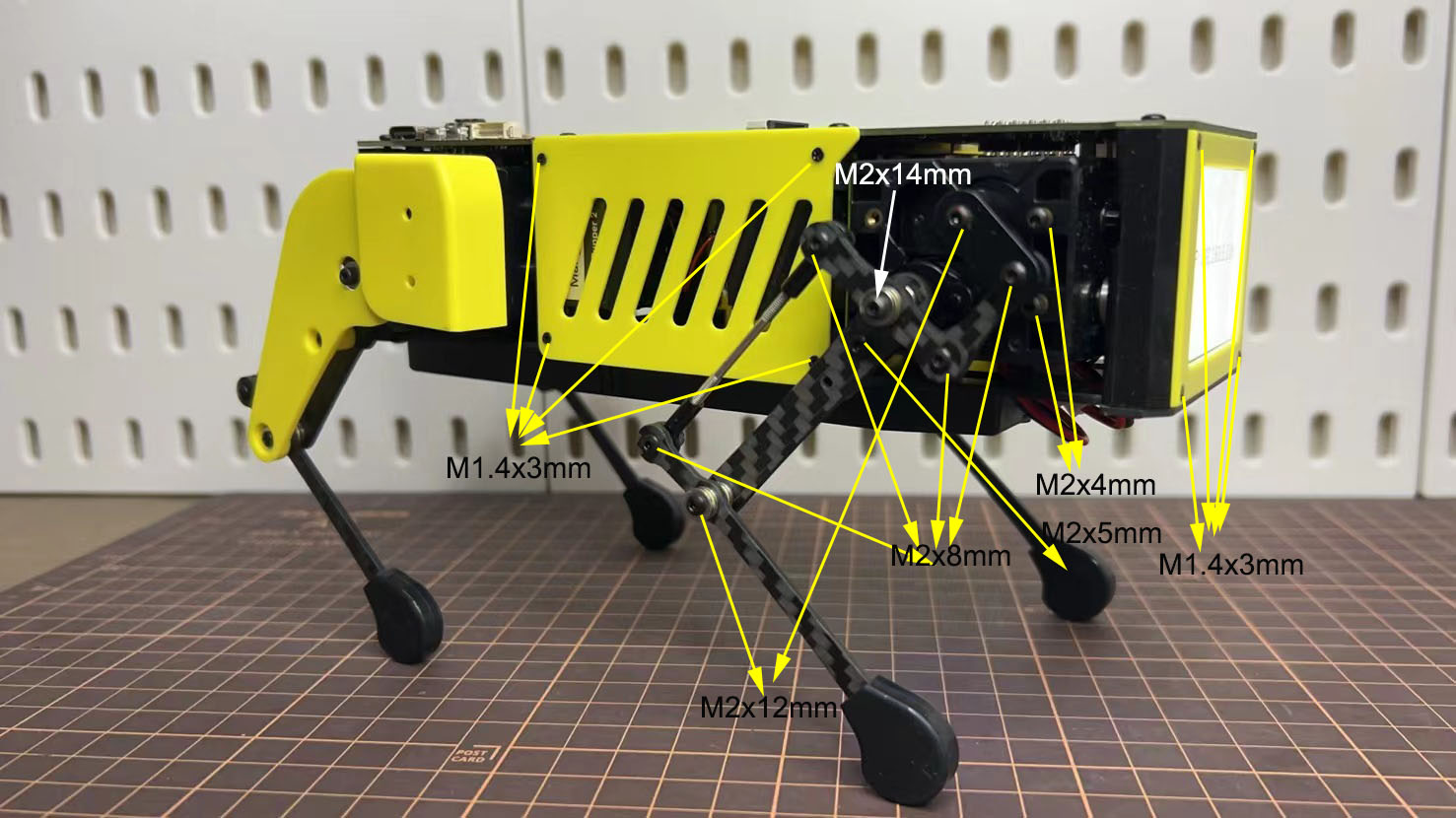
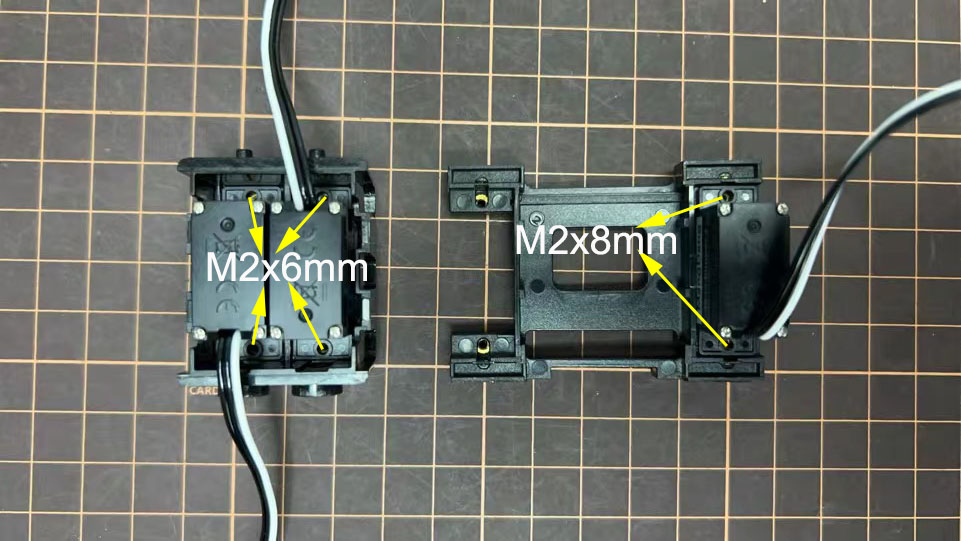
2. ネジの位置
写真はネジの位置を簡単に示しています。
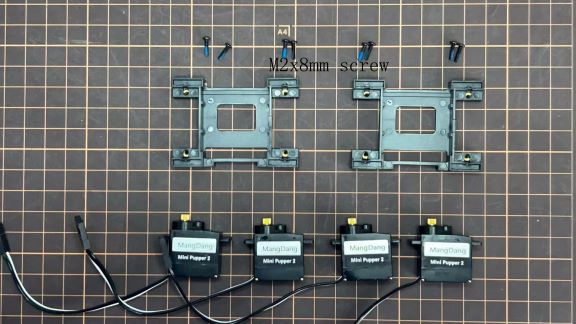
3. 脚の組み立て
以下の動画を参照してください。
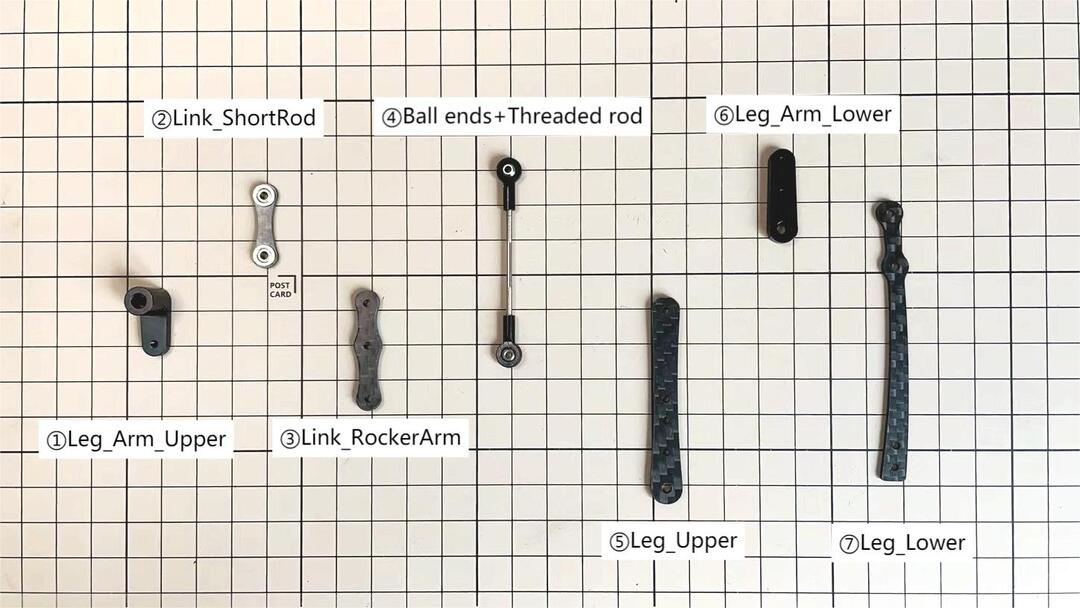
使用するボルト
M2x5mm 2x4=8 ①+②, ⑤+⑥
M2x8mm 3x4=12 ②+③, ④+⑦, ③+④
M2x12mm 1x4=4 ⑤+⑦
M2x14mm 1x4=4 ③+⑤
Step 3.1 片足
足を組み立てるとき、左側は前後セットで同じ形の足を2つ用います。右側も同様で、合わせて足を4つ組み立てます。下記は右側の前後セットを例に詳しく説明します。
説明動画は次のリンクをご参照ください。https://youtu.be/Ut7UnS3CTZs
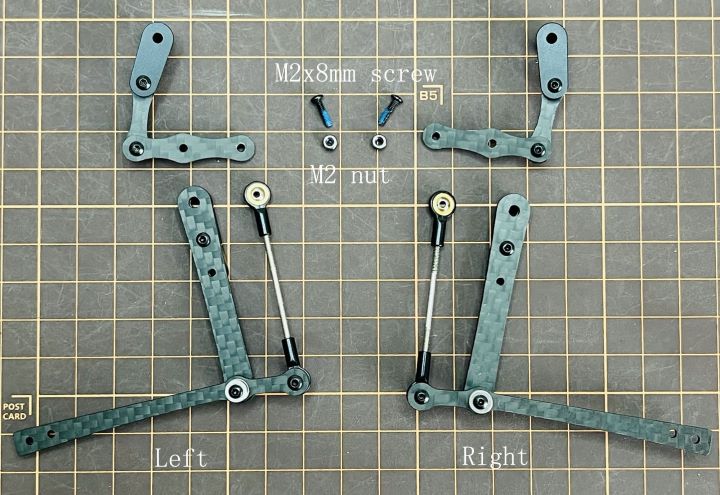
部品は以下のように番号付けされています。
①と②の組み立て


②の内側のベアリングの両面は異なります。

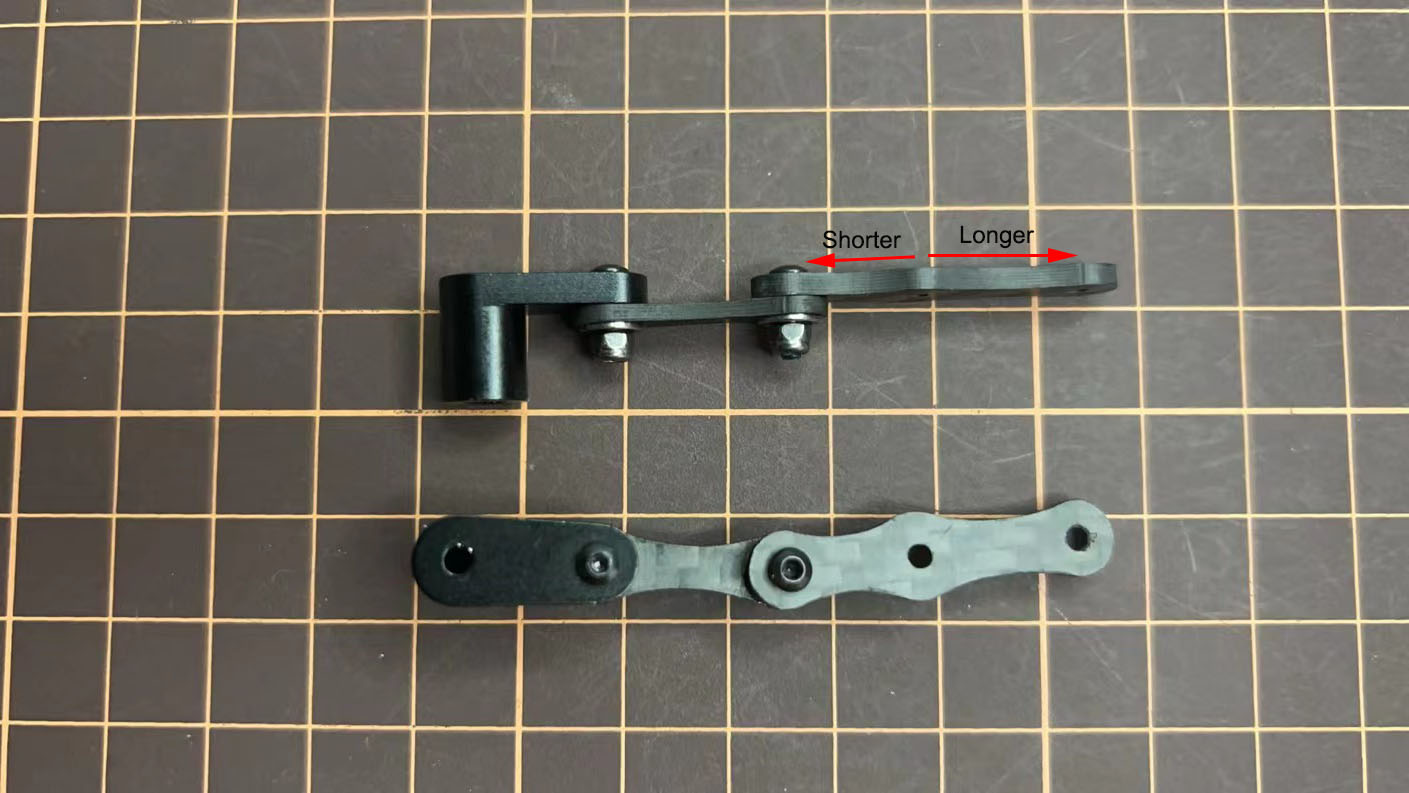
②と③の組み立て
M2x8mmのネジとM2ロックナットを使用します。ネジを③の底から上に通し、②を通してナットで締めます。③の向きに注意することが重要です。中央の穴の位置をよく確認してください。

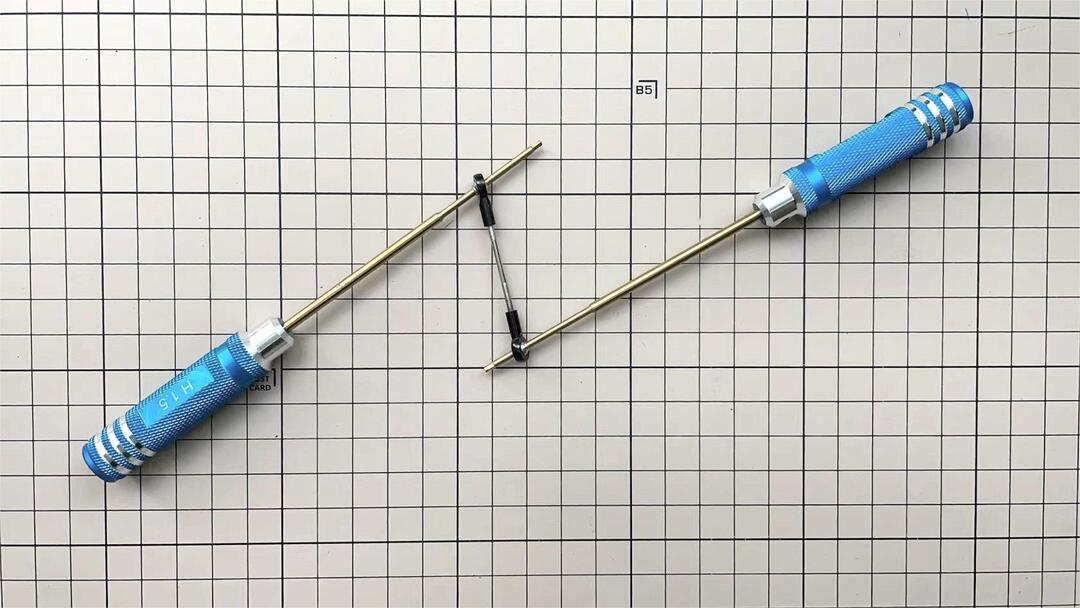
④の長さの調整
④の長さは⑤の長さと一致させる必要があります。長さを調整する際は、2本の長いネジを使用すると長さを合わせやすくなります。長さを調整したら、すべて分解します。

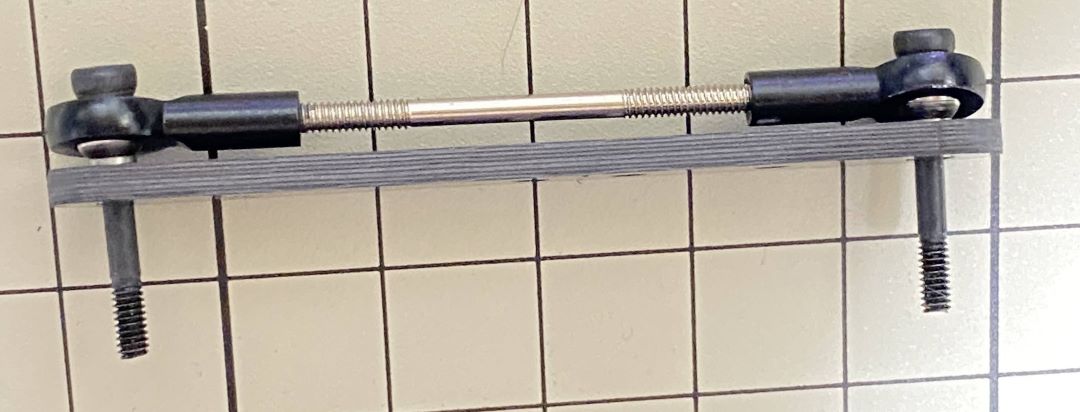
回しにくい場合は、2本のドライバーを使用して補助することができます。
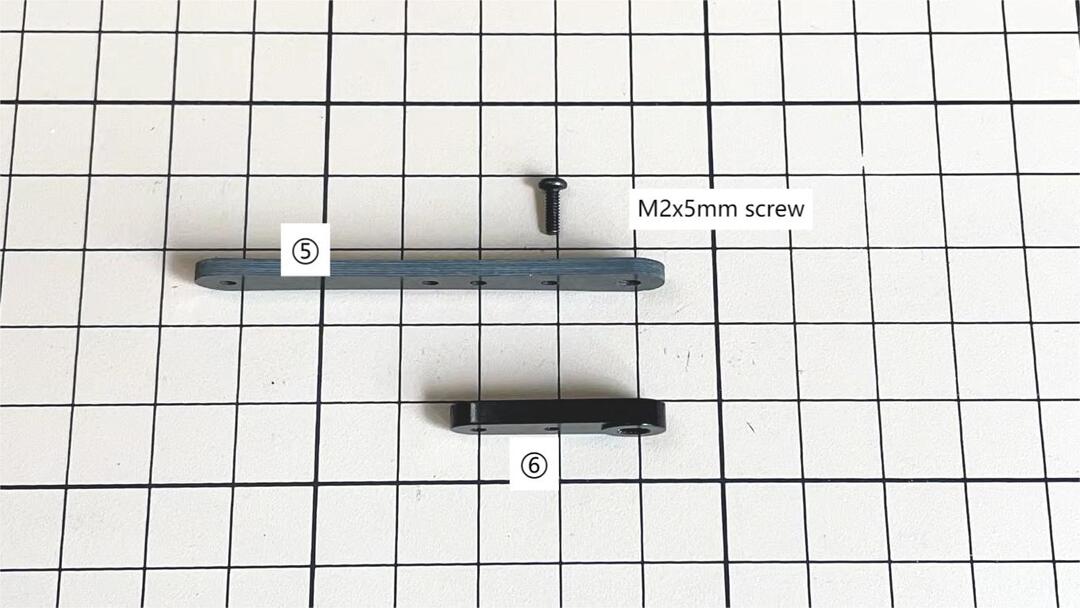
⑤と⑥の組み立て
M2x5mmのネジを1本使用します。まずネジを⑤に挿入し、⑥の穴に差し込んで締めます。⑥の大きな穴は表面を向くようにしてください。


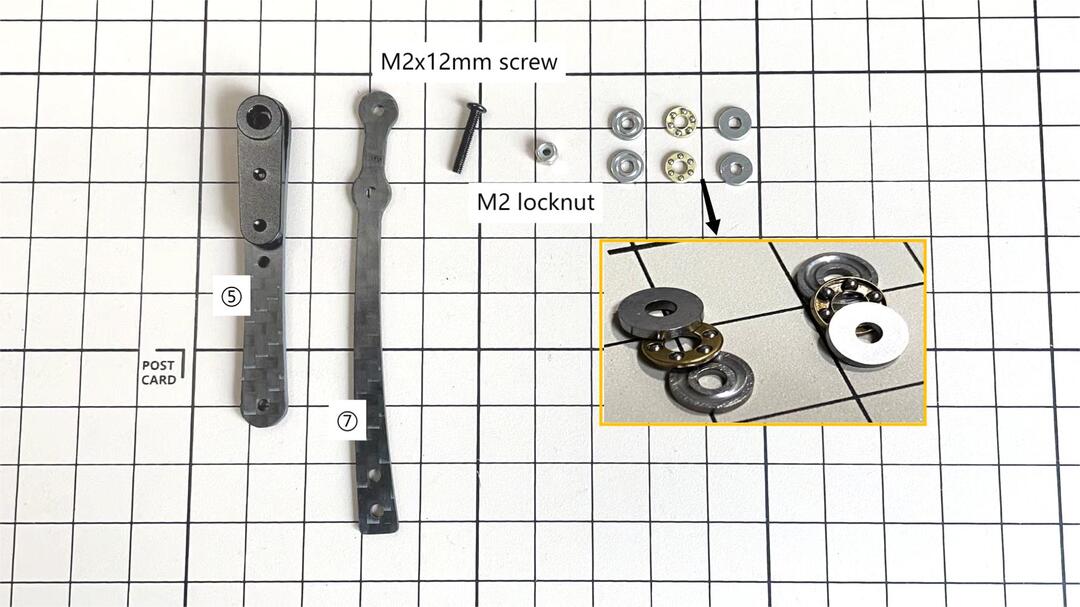
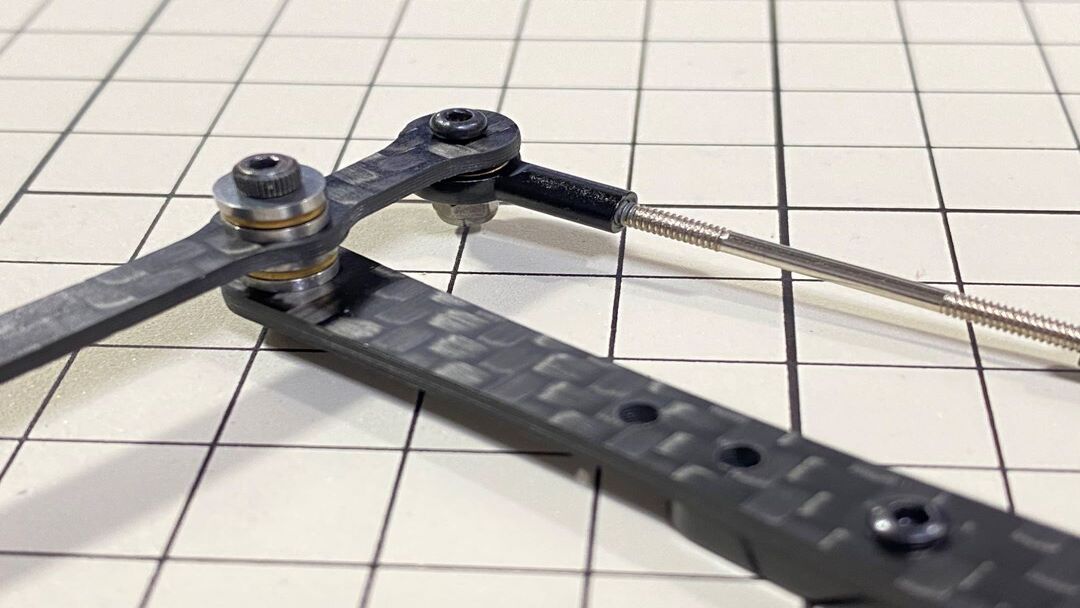
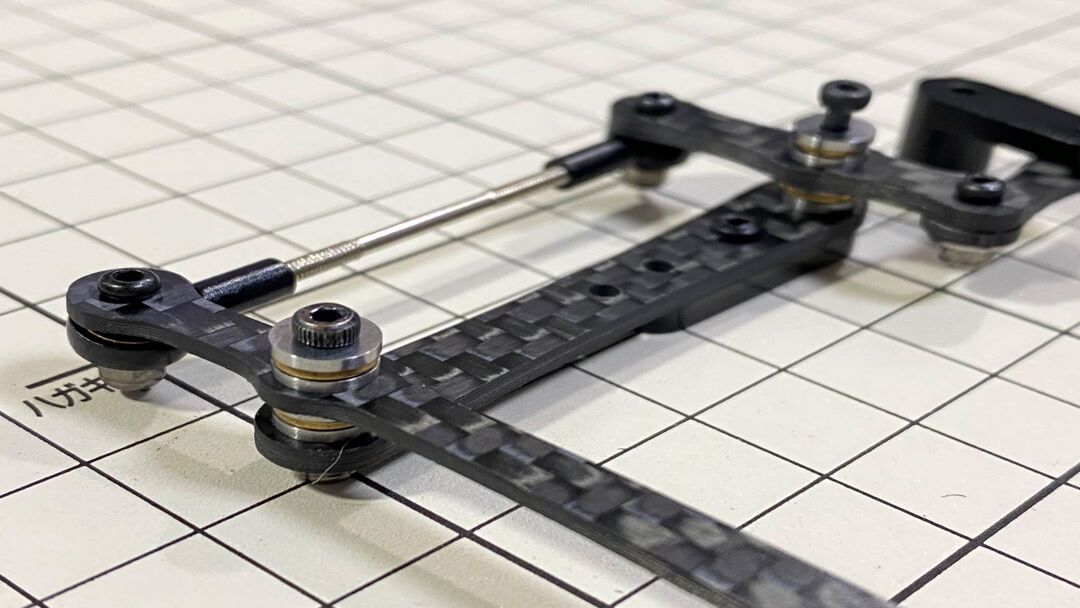
⑤と⑦の組み立て
M2x12mmのネジ、M2ロックナット、2セットのボールベアリングを使用します。各ボールベアリングは3つの部品で構成されており、上下の部品は溝のある面を内側に向けます。ネジを1セットのボールベアリングに通します。次に、ネジを⑦の穴に挿入します。⑦の反りのある側が正しい向きになっているか確認してください。次に、もう1セットのボールベアリングをネジ込みます。最後に、ネジを⑤に挿入し、ナットで締めます。

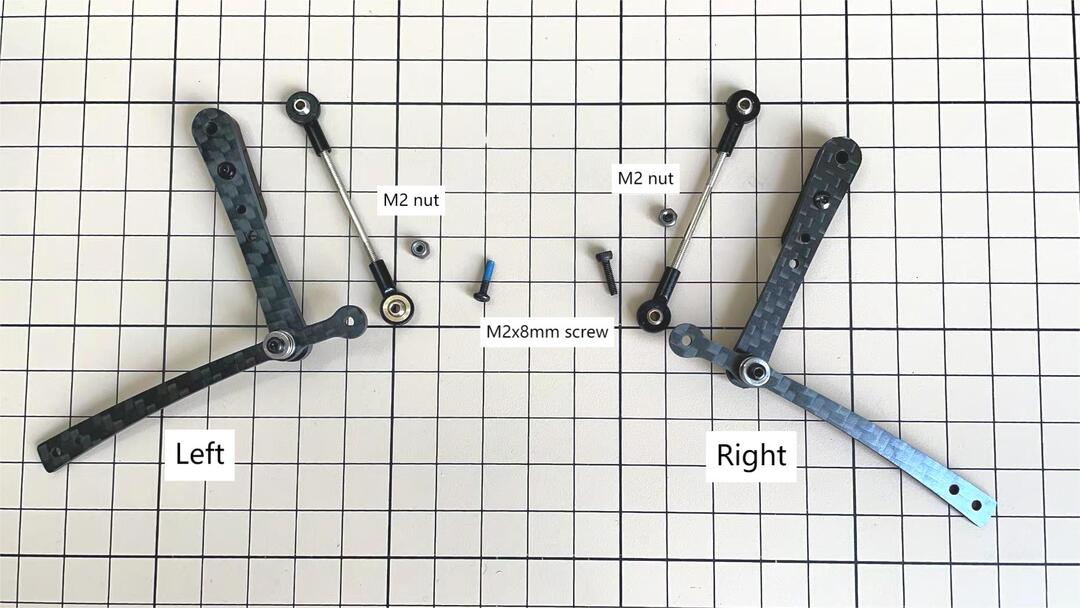
④と⑦の組み立て
M2x8mmのネジとM2ナットを使用します。ネジを⑦に挿入し、④を通してナットで締めます。④の前後の向きはどちらでも構いません。
左右の脚

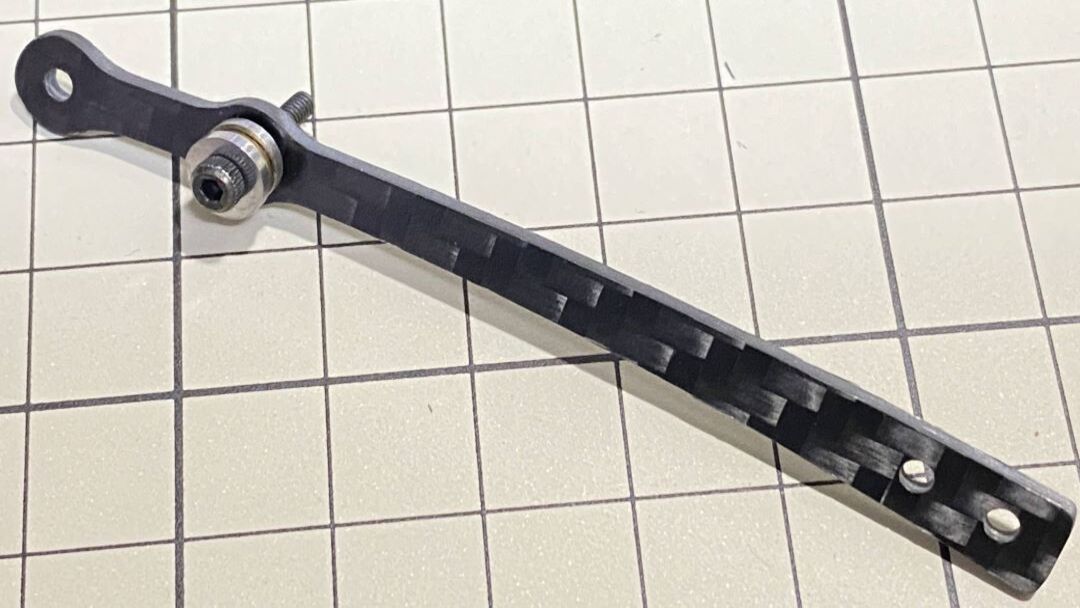
③と④の組み立て
M2x8mmのネジとM2ナットを使用します。ネジを③に挿入し、④を通してナットで締めます。
左右の脚

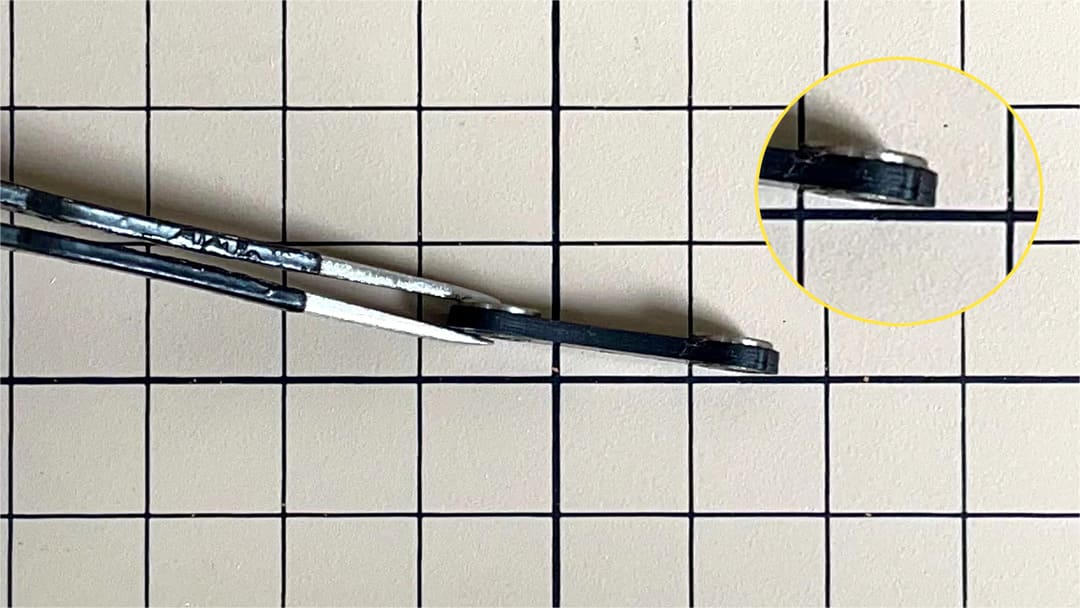
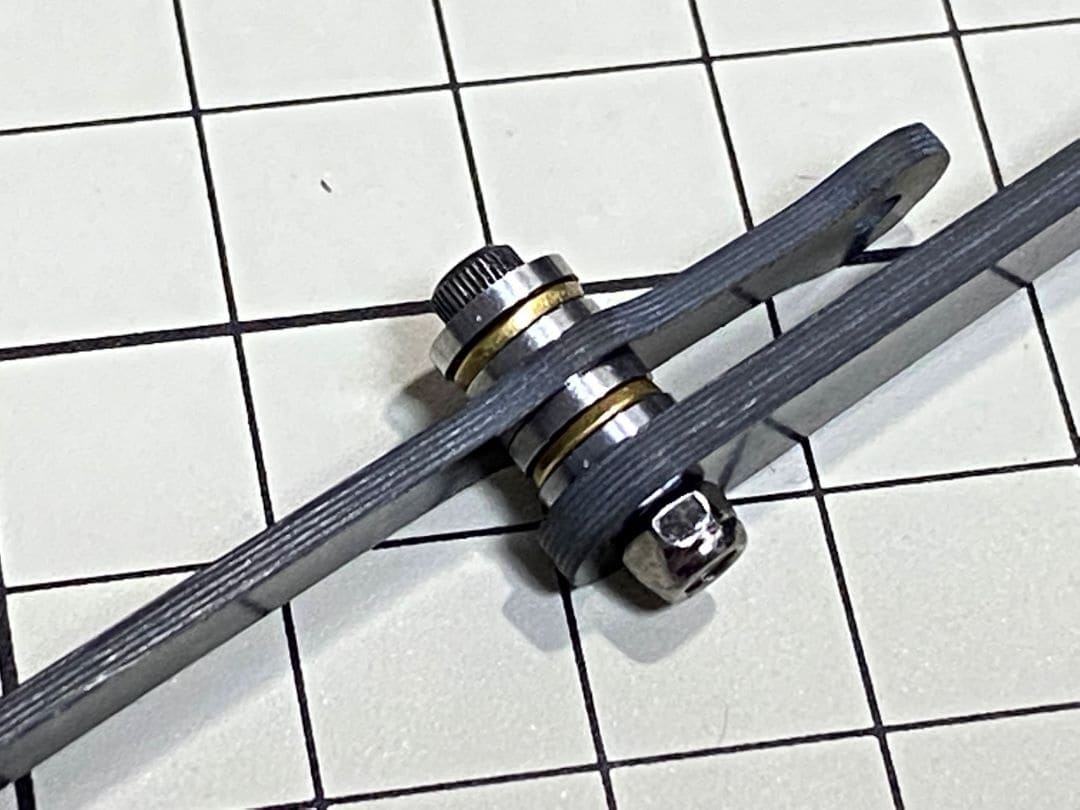
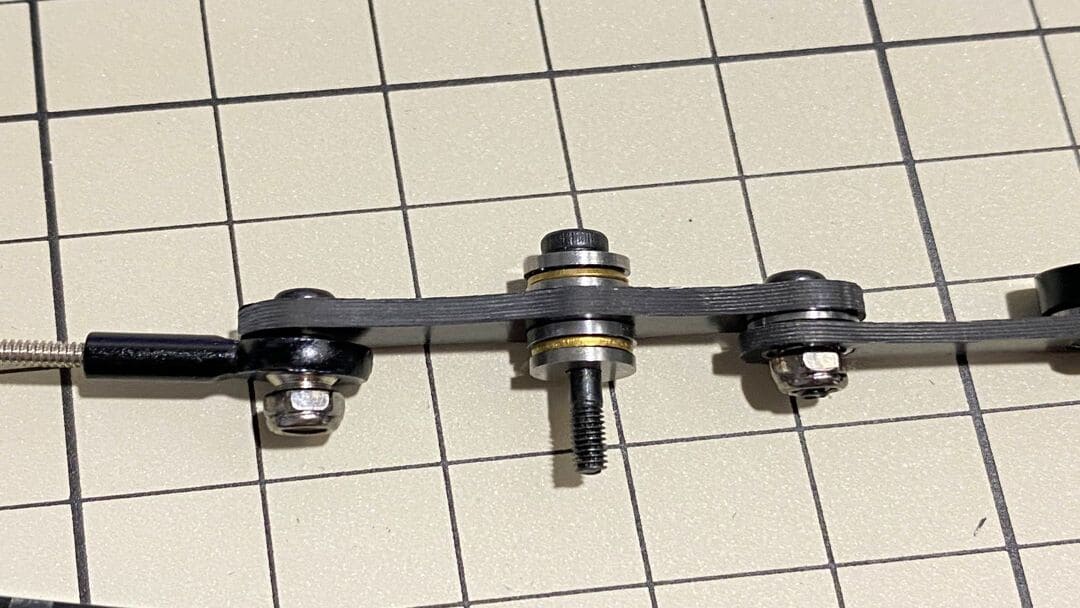
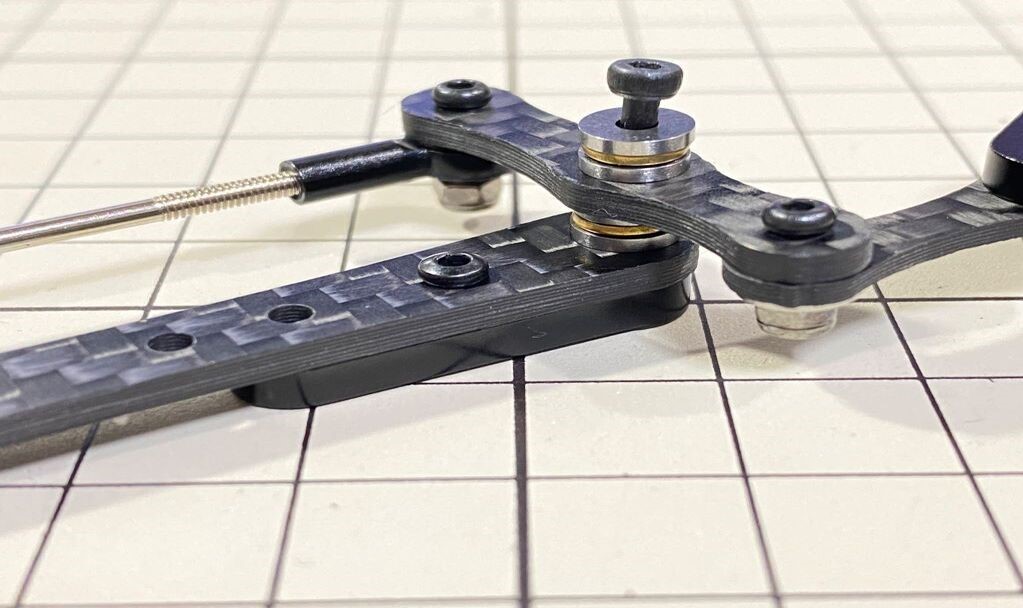
③と⑤の組み立て
M2x14mmのネジと2セットのボールベアリングを使用します。ネジをベアリング、③、ベアリング、⑤の順に通します。この時点ではネジは固定しませんが、次のStep でサーボを取り付ける際に締めます。

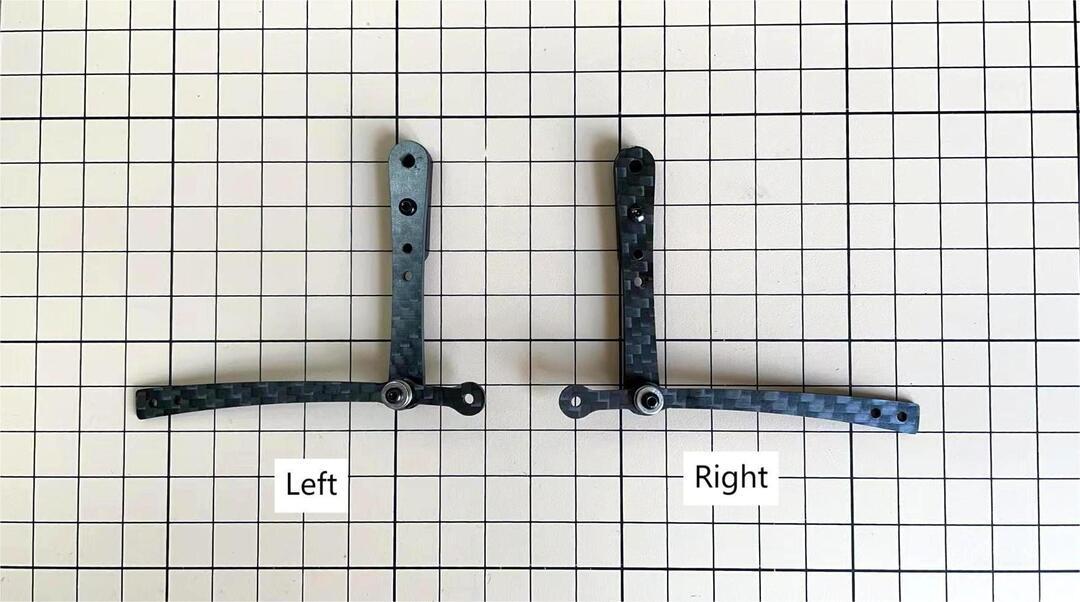
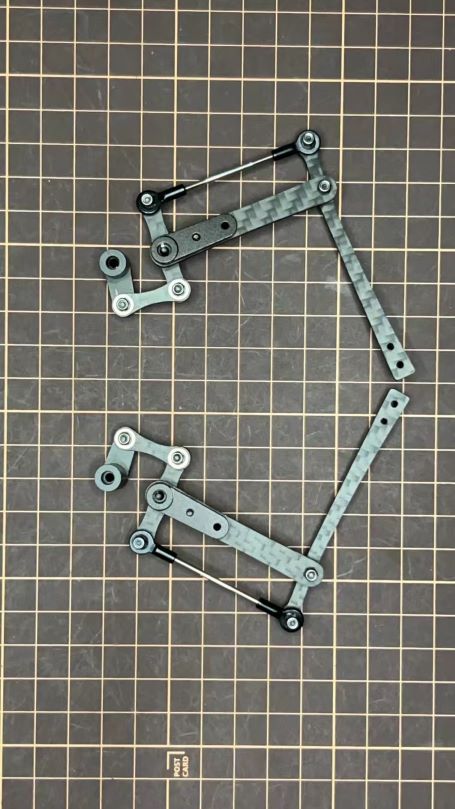
右脚の完成
これで右側の脚が1本完成しました。様々な角度から見た写真を示します。左脚は右脚と対称になるようにします。

反対側
Step 3.2 4本の脚

Step 3.3 ロックタイト
ミニぷぱをしばらく動かすと、一部のネジやナットが緩むことがあります。必要に応じて確認して締め直す必要があります。その仕組みを理解しておくと役立ちます。
※ 初めてのユーザーには、最初はロックタイトの使用をお勧めしません。十分な経験を積んでから使用してください。
※ ロックタイトはナットの緩みを防ぎますが、緩みが気になった時に締め直すだけでも良いため、必須ではありません。

下の写真のように、一部のネジも接着剤で固定します。

4. ディスプレイと前面フレーム
ディスプレイの保護シートを剥がします。ディスプレイの端にある薄いフレキシブルケーブルを折り曲げます。ボードとディスプレイを本体に取り付けます。

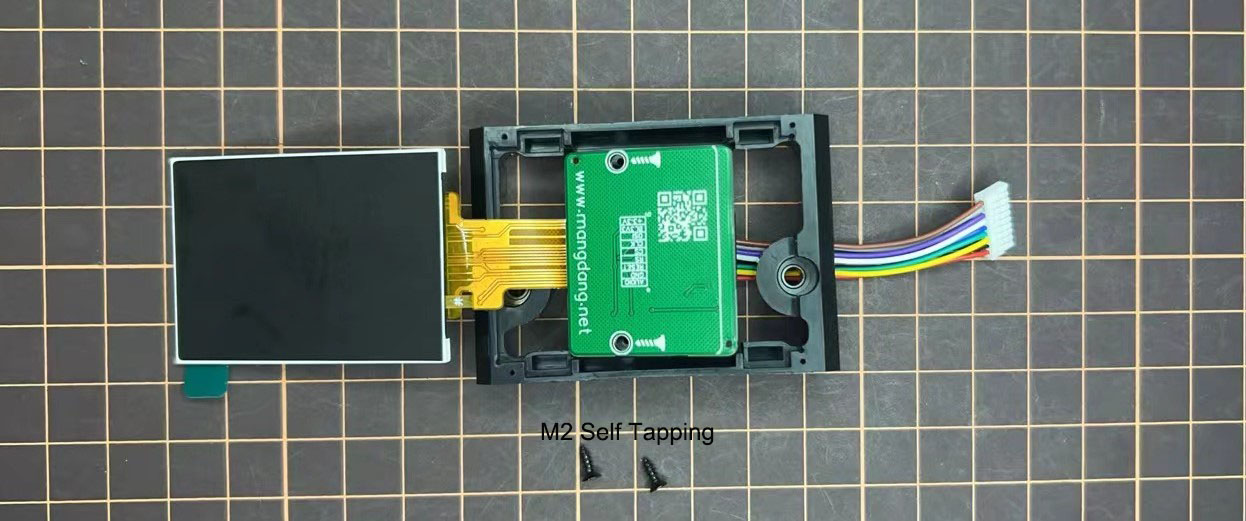

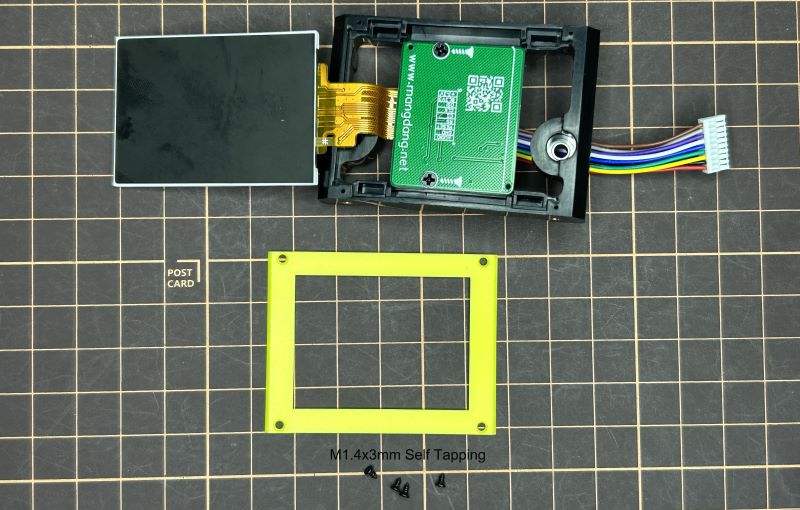
ディスプレイを取り付ける際は、棒を使ってフレキシブルFPCケーブルを優しく押し、できるだけ奥まで入れることができます。このFPCケーブルを180度に曲げないでください。


5. 本体と脚部の組み立て
CM4モジュールをキャリーボードに接続する前に、サーマルパッドの保護フィルムを必ず剥がしてください。
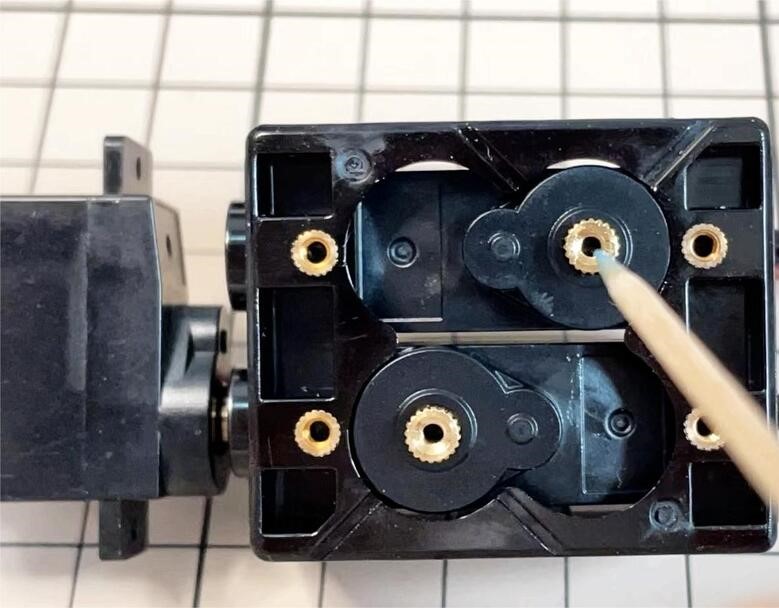
v2 proバージョンではサーボIDを設定する必要はありません。サーボIDはハードウェア設計で固定されています。
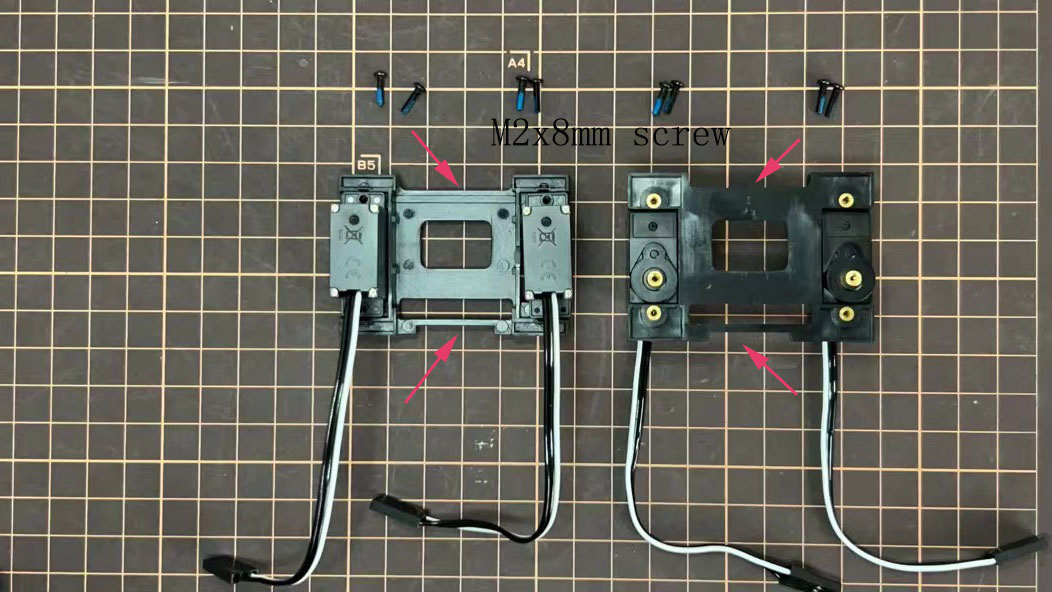
各サーボの位置については、以下の写真を参照してください。
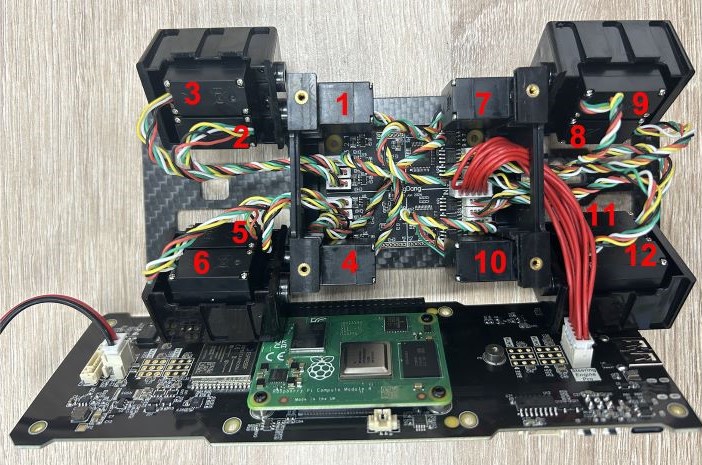
Step 5.1 本体中央部品
No.1, 4, 7, 10のサーボを本体中央部品に接続します。
後で分かりやすくするために、この工程でケーブルにマスキングテープを貼り、サーボの番号を書いておくと便利です。
中央部品の向きに注意してください。
Step 5.2 脚部
サーボの位置を参考にして4つの脚部の組み立てます。
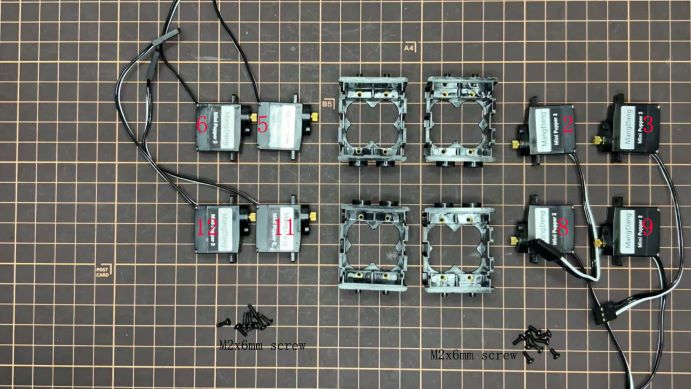
No.1, 4, 7, 10のサーボをサーボMCU PCBボードに接続します。
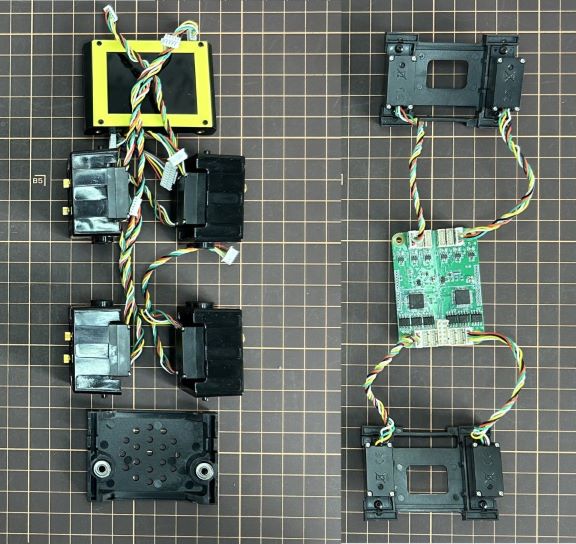
残りのサーボをサーボMCU PCBボードに接続します。
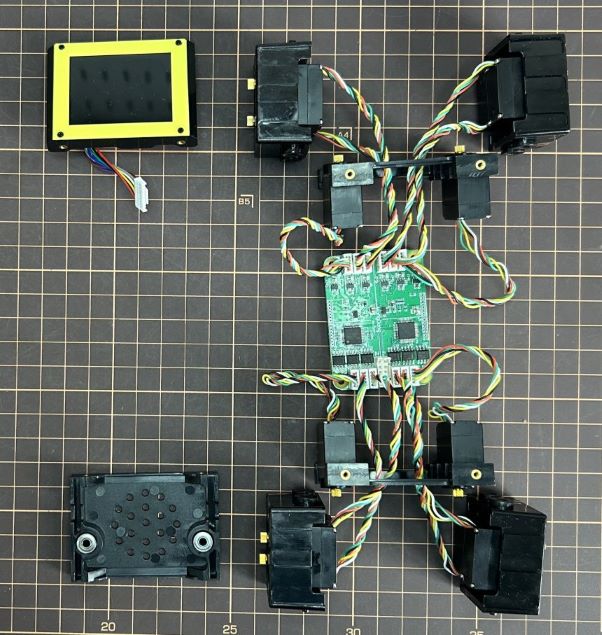
サーボケーブルコネクタの向きに注意してください。
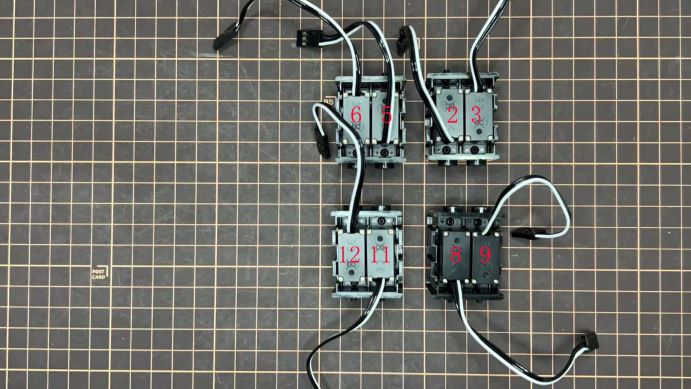
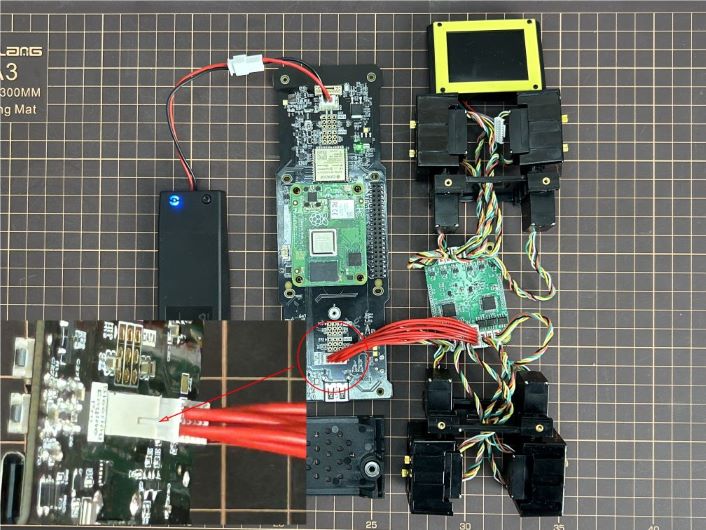
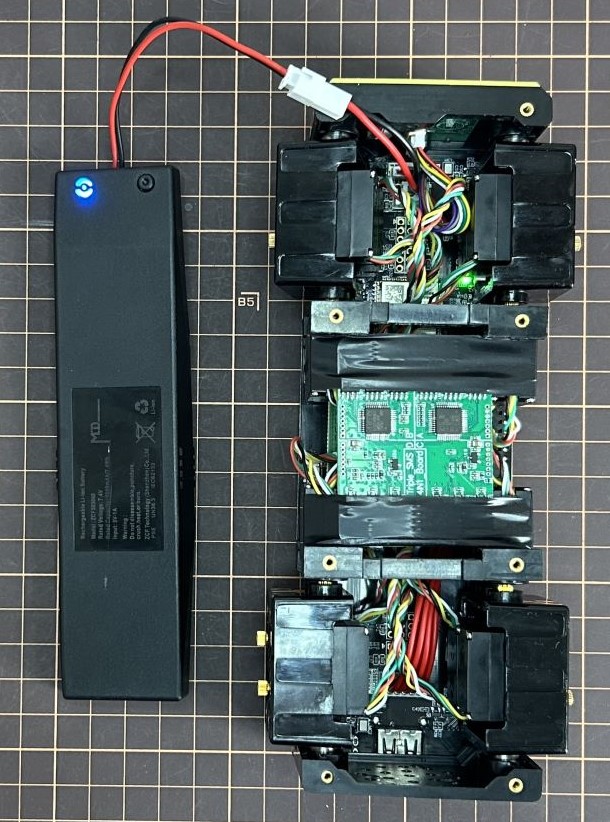
DIY ケーブルを使用して、上部の PCB基板をサーボ MCU PCB基板に接続します。
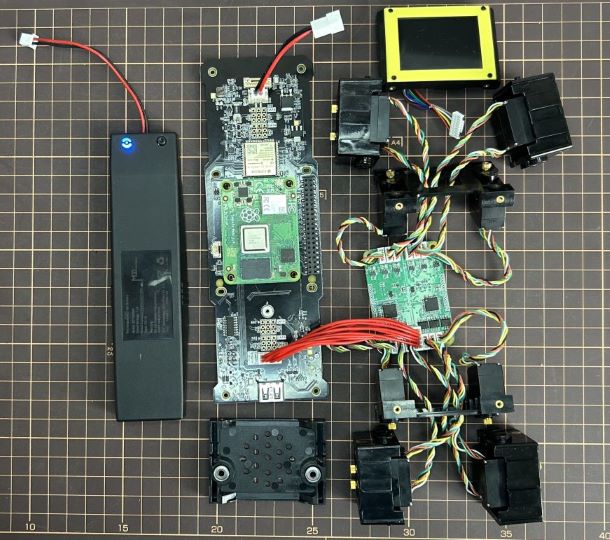
バッテリーの電源を入れ、トップPCBボードに接続します。
4つの黒い脚部を対応するサーボ(No.1, 4, 7, 10)に接続します。
4つの脚部をボディに注意しながら接続します。
この時点でバッテリーの電源を切らないでください。
すべてのサーボの位置が正しいことを確認してください。
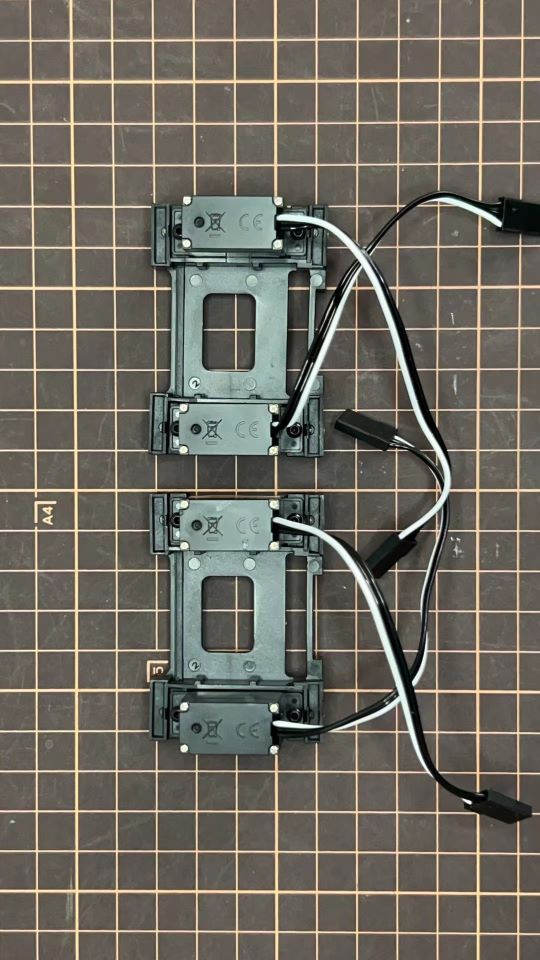
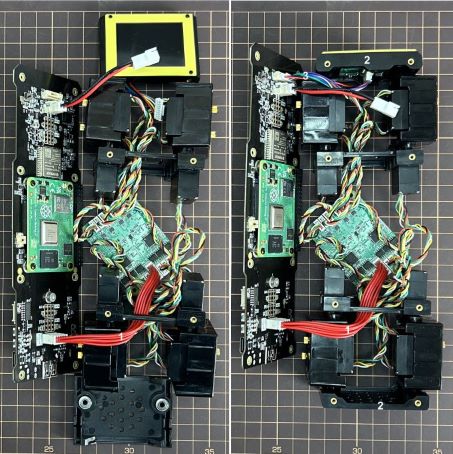
Step 5.3 本体前後のパーツ
バッテリーの電源を切り、赤いケーブルの位置を調整して前面と背面の本体部品を接続します。
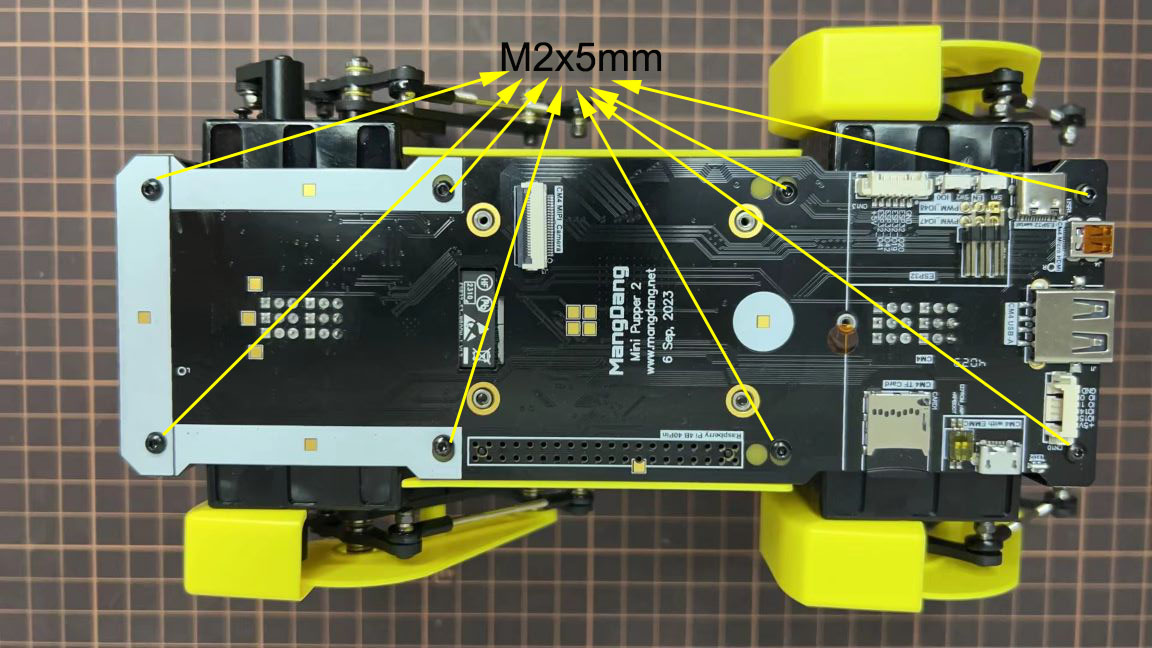
ネジを使用してトップPCBボードを固定します。
サーボMCU PCBボードをテープで固定することができます。
バッテリーの電源を入れ、上部の PCB基板に接続して、4 つの黒い脚部部品の位置が正しいことを確認します。
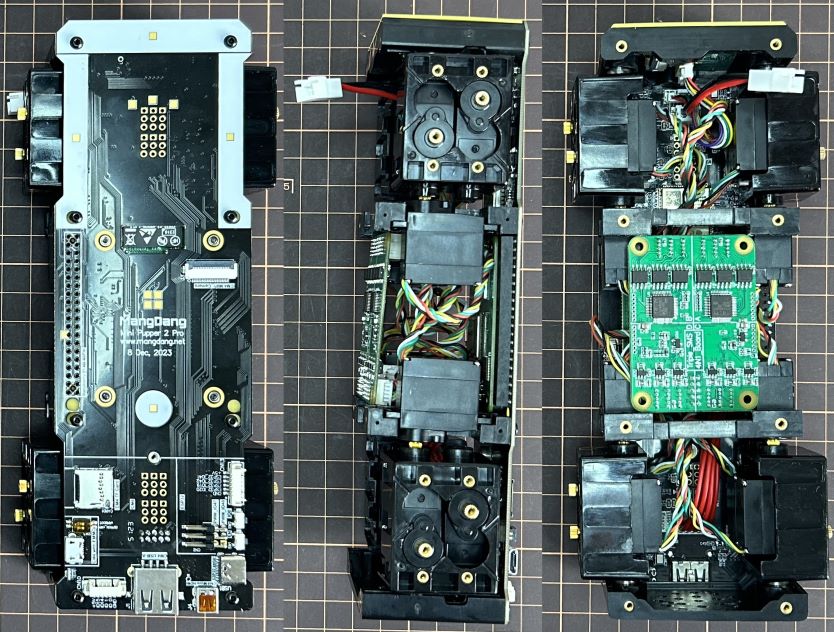
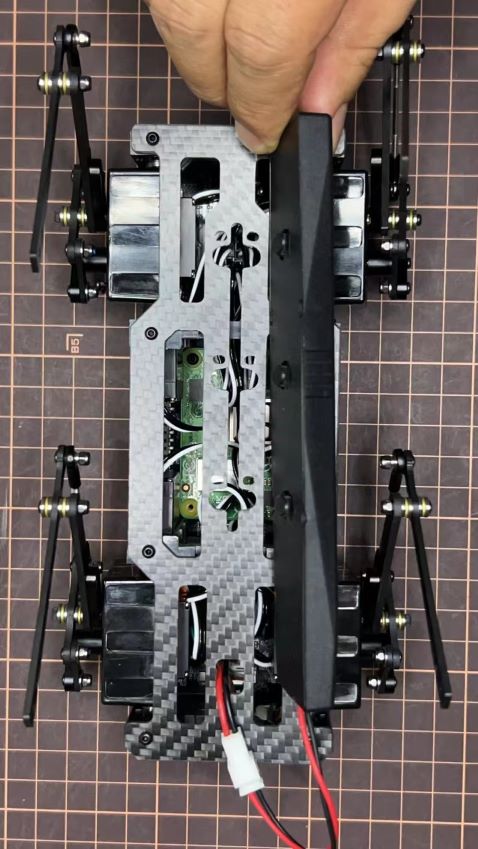
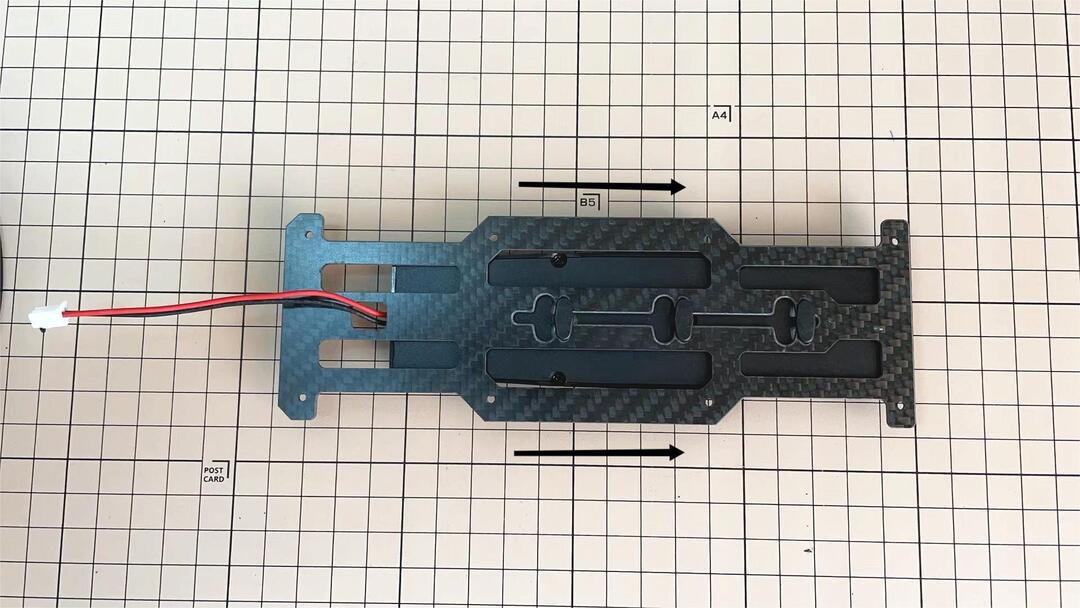
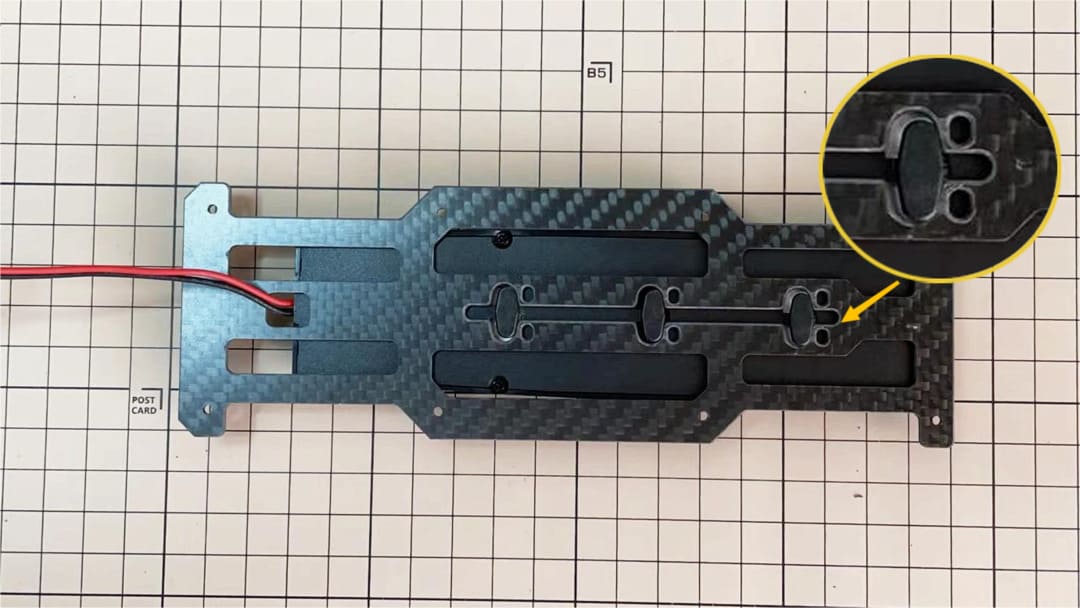
中央部品を底部のカーボンファイバーに接続します。
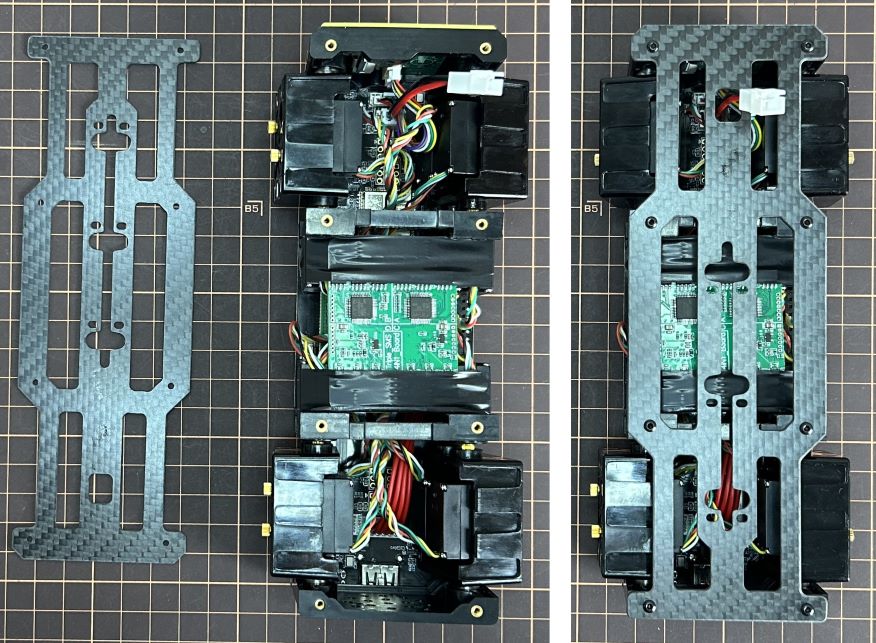
カーボンファイバーの前後の向きに注意してください。
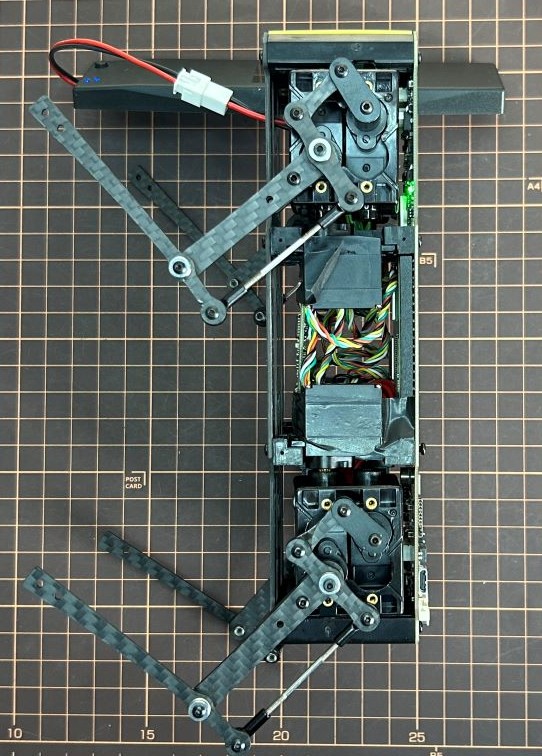
Step 5.4 4本の脚を本体に組み立て
4本の事前に組み立てた脚を準備します

理論的に最適な角度に注意してください。できるだけ理論的に最適な角度に合わせることをお勧めします。
しかし心配いりません。後でソフトウェアを使用して角度を調整します。
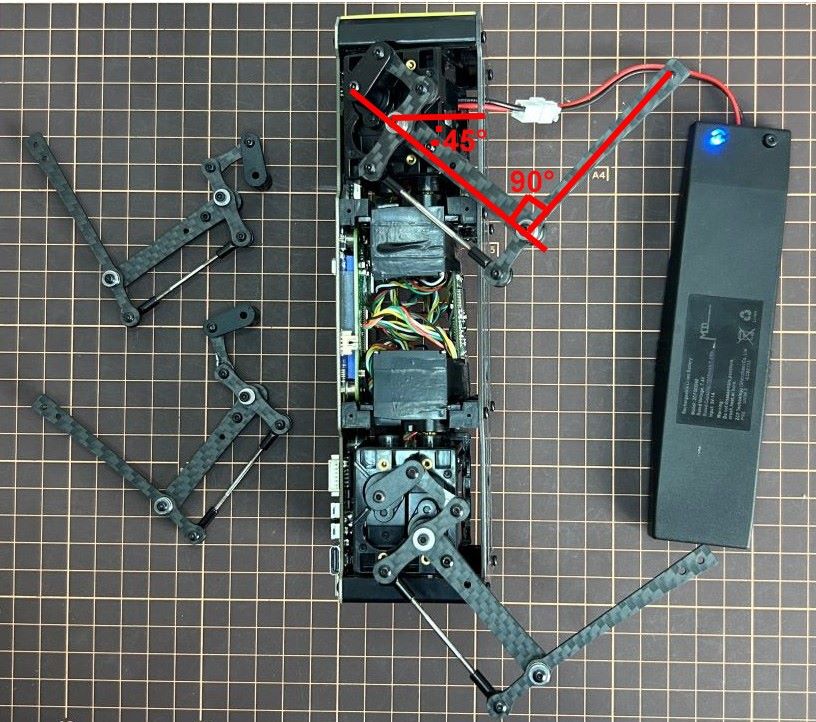
Step 5.5 バッテリーを本体に組み立て
バッテリーを後方にスライドさせて固定します。
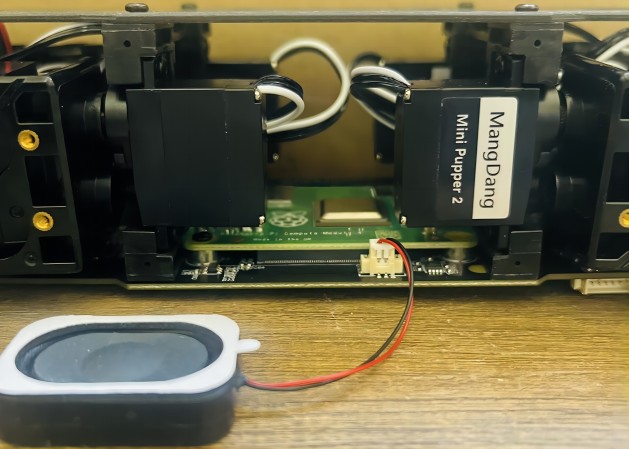
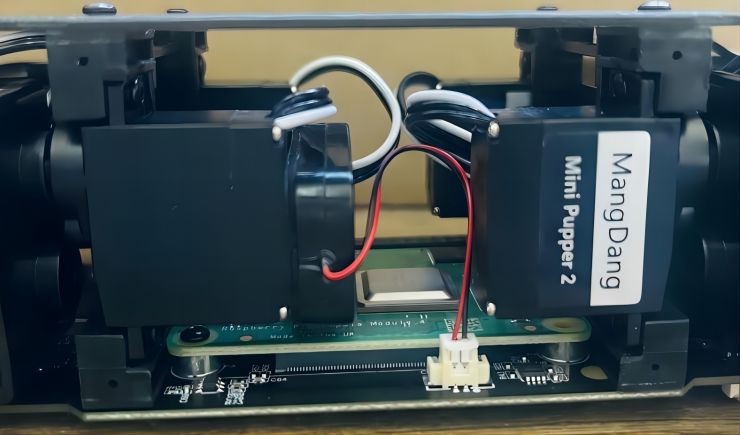
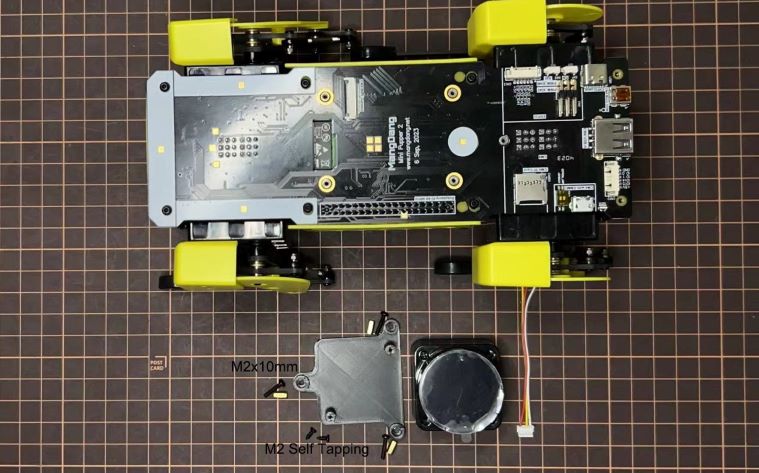
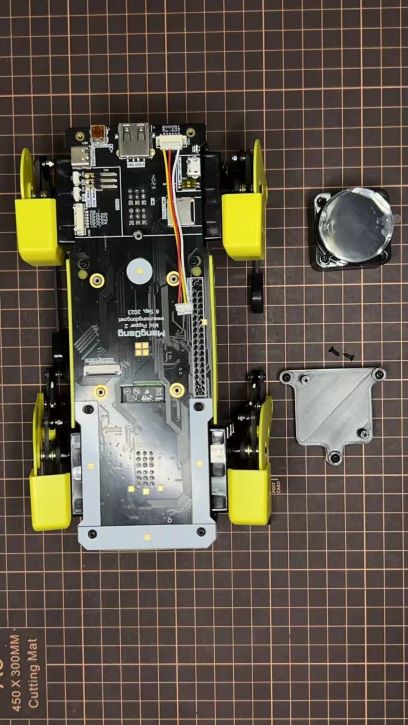
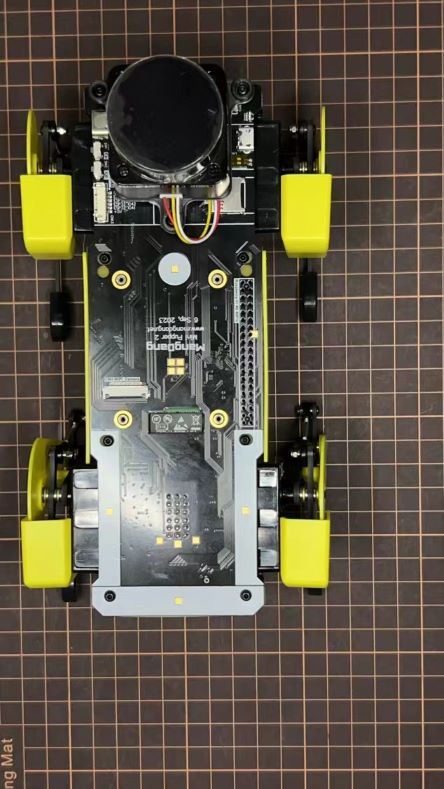
Step 5.6 スピーカーの組み立て
6. カバー部の組み立て
以下の動画を参照してください。
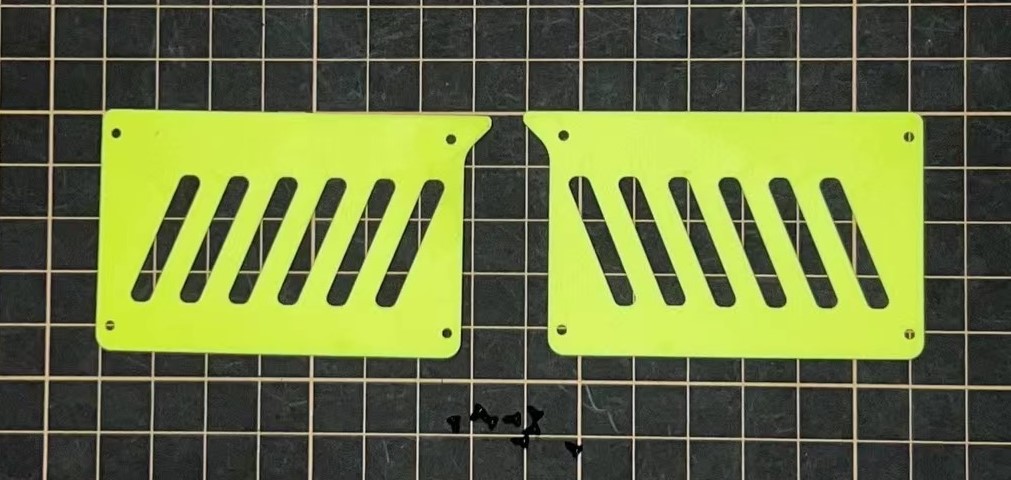
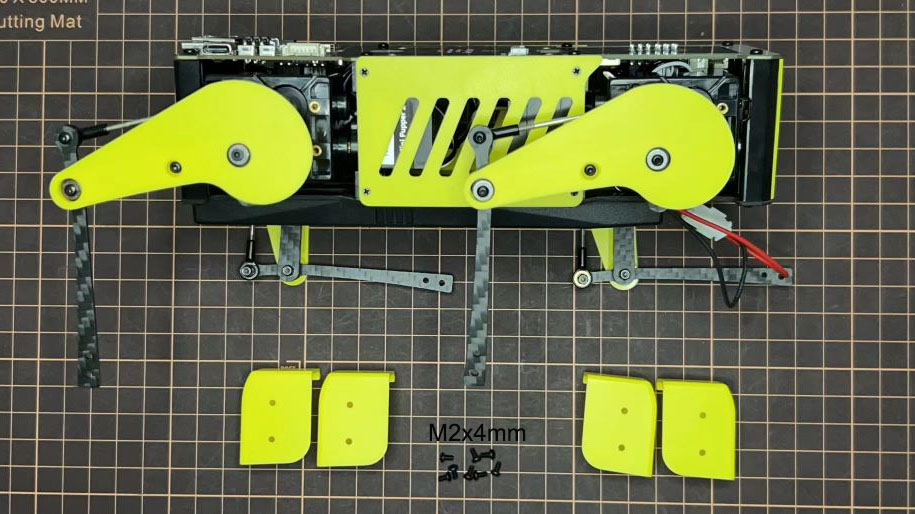
Step 6.1 サイドパネル

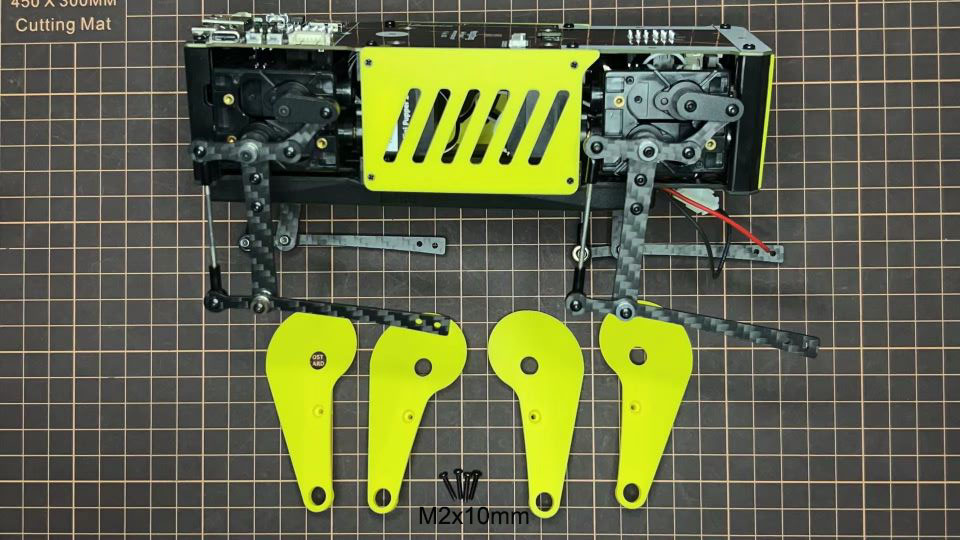
Step 6.2 もものカバー
M2x10mmの皿ネジを4本使用します。
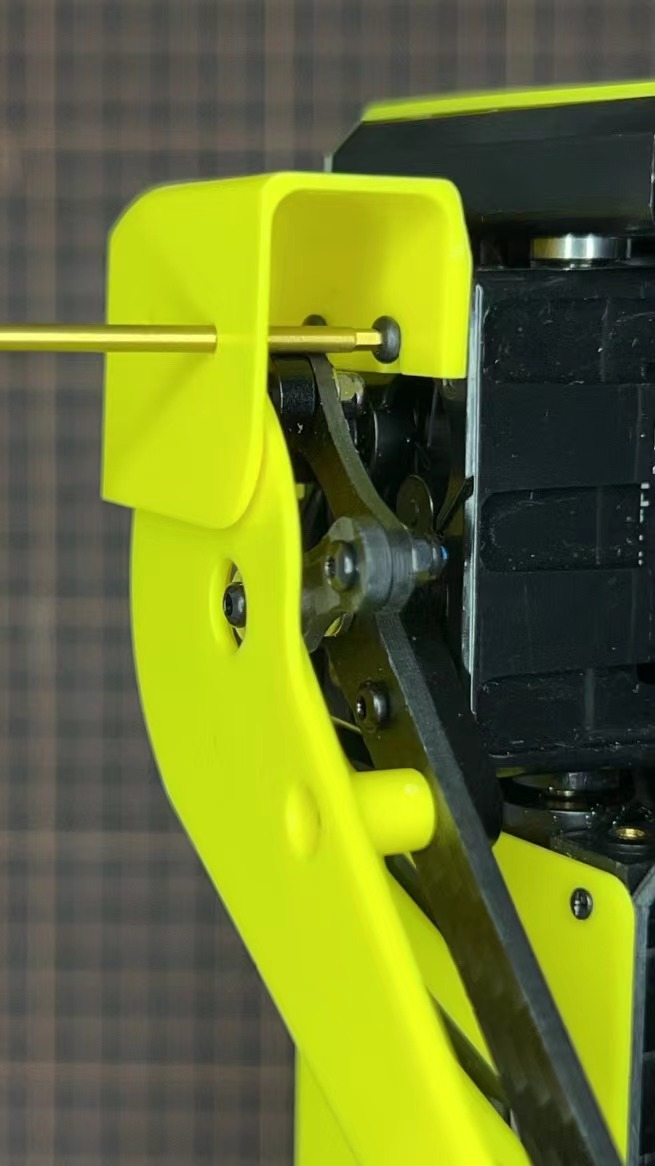
Step 6.3 ショルダー
まずネジだけを差し込み、その隙間にショルダーパーツを差し込みます。ショルダーパーツの穴に2mmの六角ドライバーを差し込んでネジを締めます。



Step 6.4 足先
足先を4つ取り付けます。

完成!
7. アドオンの組み立て
Step 7.1 Lidar
Lidarを注文すると、3Dプリントされたホルダーとカスタムケーブルが一緒に出荷されます。STLファイル を使用して、ホルダーを自分で印刷することもできます。
3つのホルダーを3Dプリントされた部品に接続します。

カスタムケーブルをPCBボードのLidarコネクタに接続します。
3Dプリントされた部品をPCBボードに固定します。

カスタムケーブルをLidarモジュールに接続し、タッピングネジで固定します。
Step 7.2 カメラ
ミニぷぱ2は、1つのPiカメラまたはOpenCV OAK-D-Liteカメラモジュールもサポートしています。STLファイル を使用して、ホルダーを自分で印刷することもできます。