ミニぷぱ2の組み立て
組み立てキットは2種類あります。
Complete Kit(コンプリートキット):機械的なディテールを隅々まで把握したいという方に最適なキットです。パーツを一からすべて組み立てる必要があるため、ハンズオンでの作業が求められます。没頭感のあるこのDIYプロジェクトには、最低でも5時間以上かかることを見込んでください。
Standard Kit(スタンダードキット):よりスピーディーに始めたい方には、こちらが最適です。脚部分があらかじめ組み立て済みなので、約1時間ほどで完成させてすぐに使用を開始できます。大掛かりな組み立てに時間をかけず、気軽に楽しみたい方のためのキットです。
これはスタンダードキットのビデオクリップです。詳細な手順については「スタンダードキットのメインパーツ組み立て」セクションを参照してください。
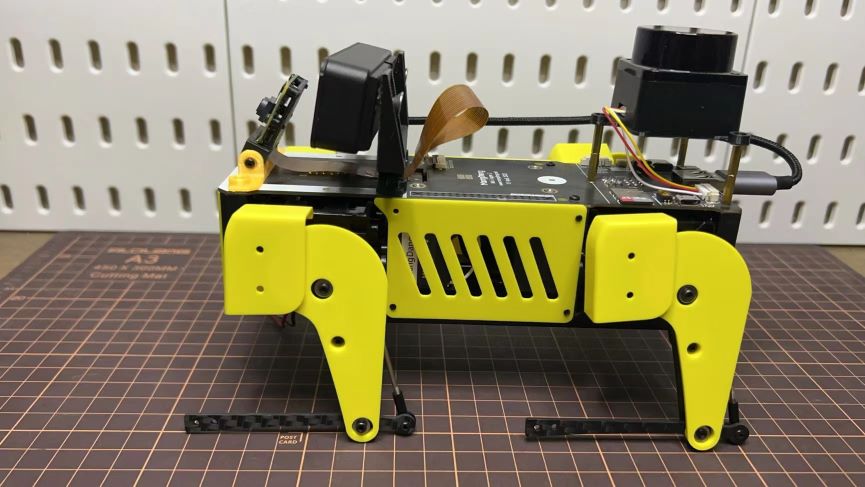
これはコンプリートキットのビデオクリップです。詳細な手順については以下のセクションを参照してください。
ミニぷぱ2 Fusion 360 CADモデルも参照してください: https://a360.co/485n8mP
1. ビルド済みイメージをmicroSDに書き込む
工具
キットに含まれている工具に加えて、以下のものが組み立てに必要です。
USBキーボード
USBマウス
PC
microSDカードリーダー
HDMIディスプレイ
micro HDMIケーブル
USB充電器
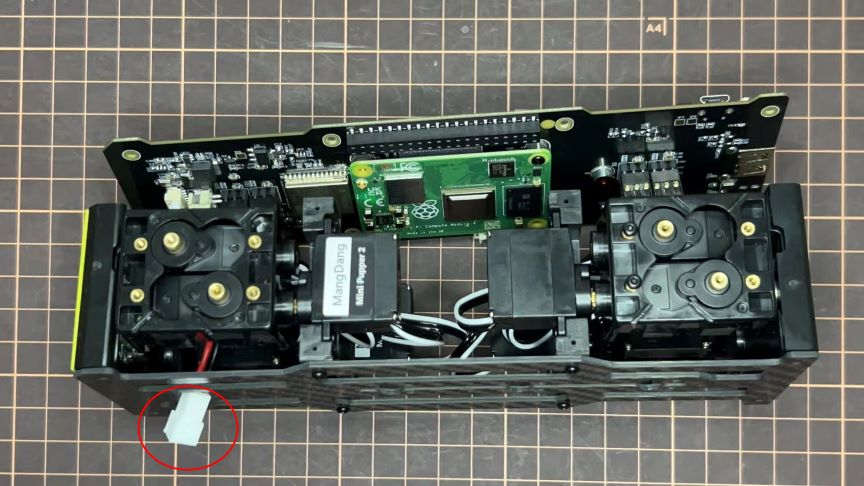
Step 1.1 バッテリーの充電
バッテリーはUSB経由で充電します。USB端子は写真を参照してください。ミニぷぱ本体に取り付けた状態でも充電できます。
※ LEDライト:緑色は十分な電力があることを示し、赤色は充電が必要なことを示します。
※ 5V/1Aのアダプターを推奨します。5V/2Aのアダプターを使用した場合、バッテリーICが1Aに変換します。80%充電するのに約1時間かかり、ライトが緑色になります。100%まで充電するにはさらに1時間かかりますが、ライトが緑色になれば使用可能です。

Step 1.2 イメージのダウンロード
ビルド済みイメージファイルは Mini Pupperビルド済みイメージ からダウンロードできます。
※ "xxx_stanford**.img"は、Ubuntu 22.04バージョンのイメージであることを示します。
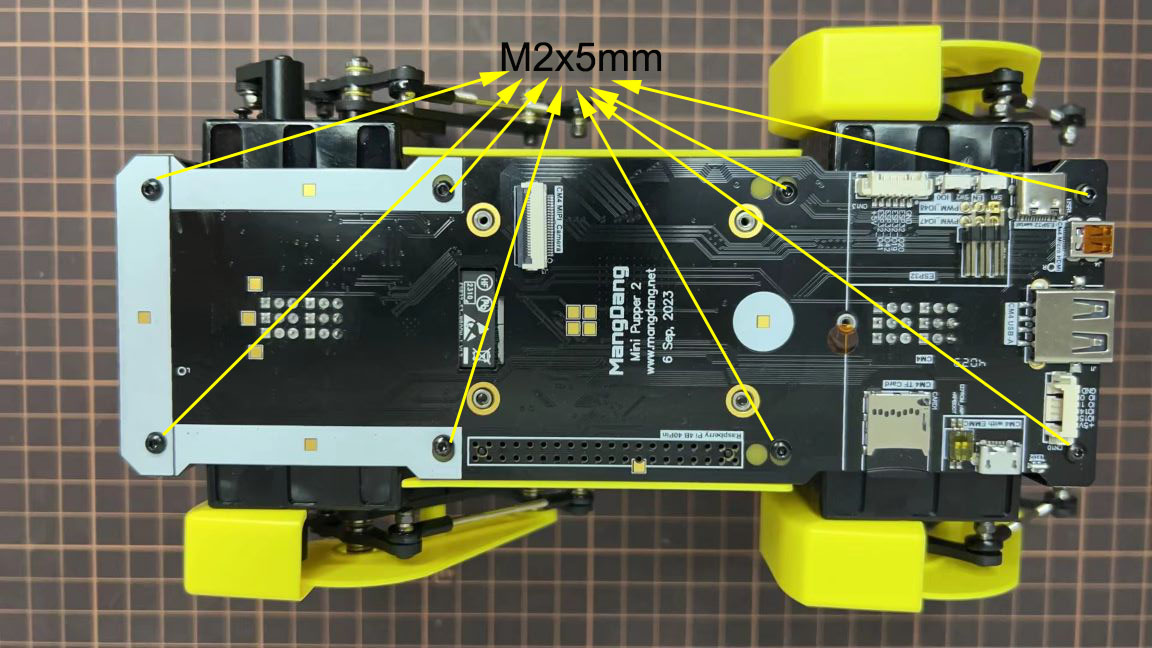
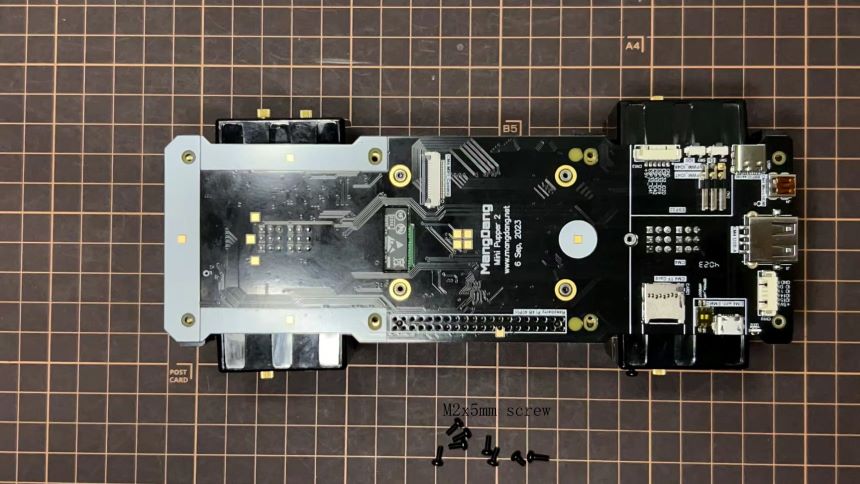
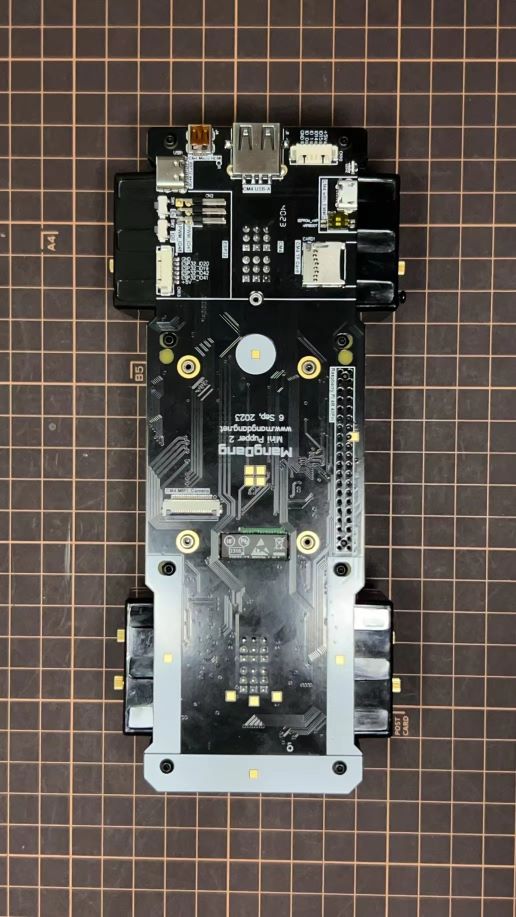
以下の写真はPCB基板です。

Step 1.3 イメージをmicroSDカードに書き込む
microSDカードをPCのSDカードリーダーに挿入し、イメージを書き込みます。簡単で信頼性の高いイメージ作成ツールとして、balenaEtcherまたはWin32DiskImagerを推奨します。完了までしばらく時間がかかります。
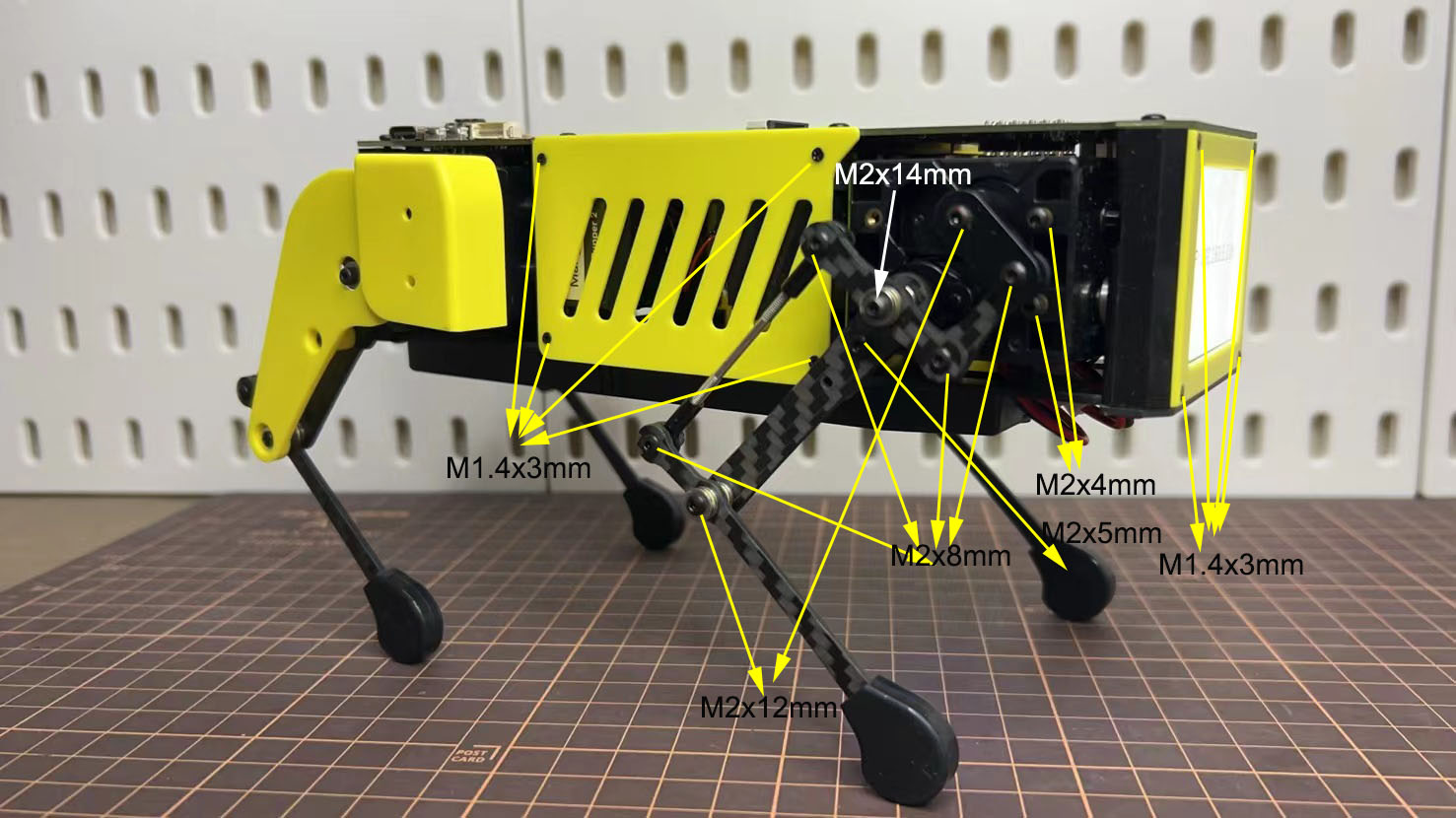
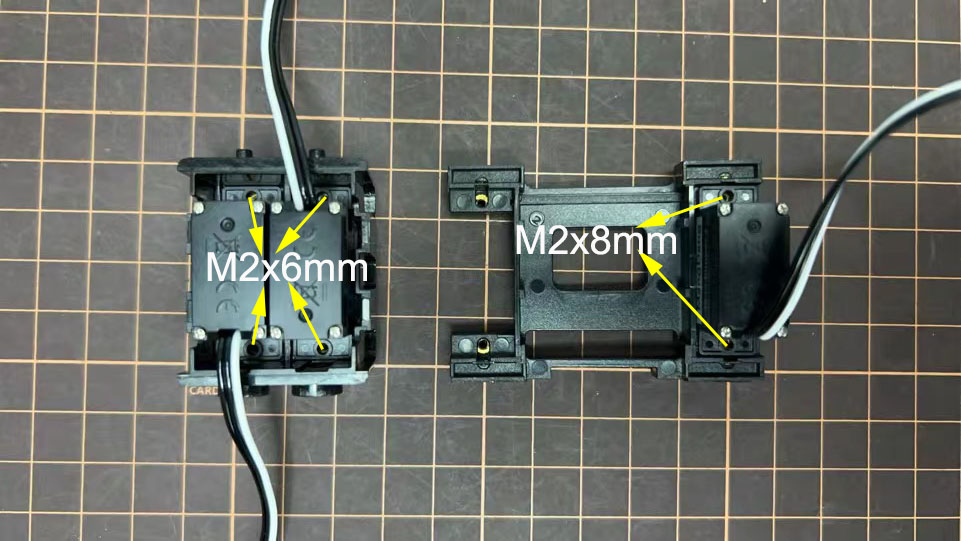
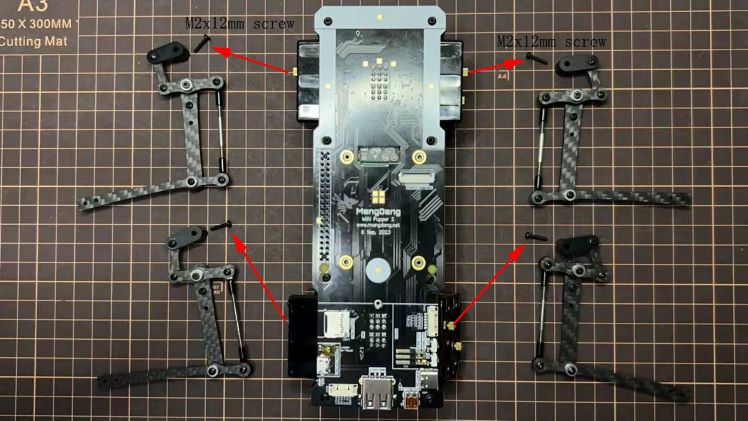
2. ネジの位置
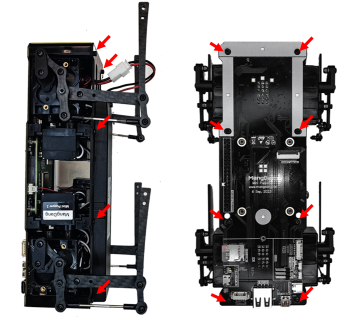
写真はネジの位置を簡単に示しています。
3. 脚の組み立て
以下のビデオクリップを参照してください。
使用するボルト
M2x5mm 2x4=8 ①+②, ⑤+⑥
M2x8mm 3x4=12 ②+③, ④+⑦, ③+④
M2x12mm 1x4=4 ⑤+⑦
M2x14mm 1x4=4 ③+⑤
Step 3.1 片足
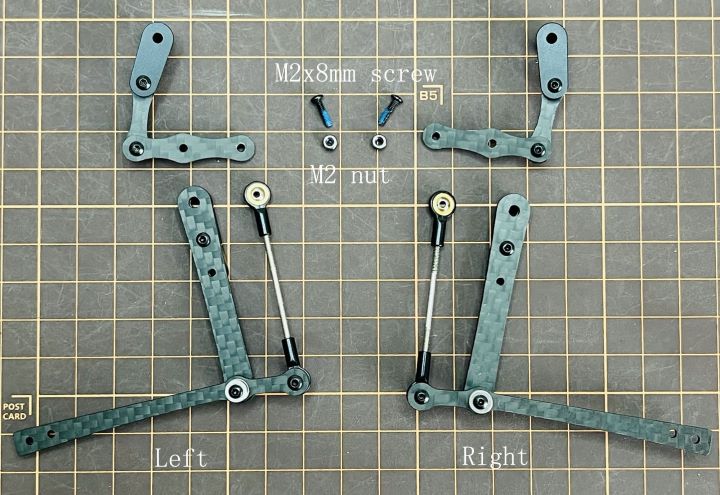
4本の脚を組み立てます。右側の前後は同じで、左側の前後も同じです。右側の組み立て方を説明します。
説明動画は下記のリンクをご参照ください。 https://youtu.be/Ut7UnS3CTZs
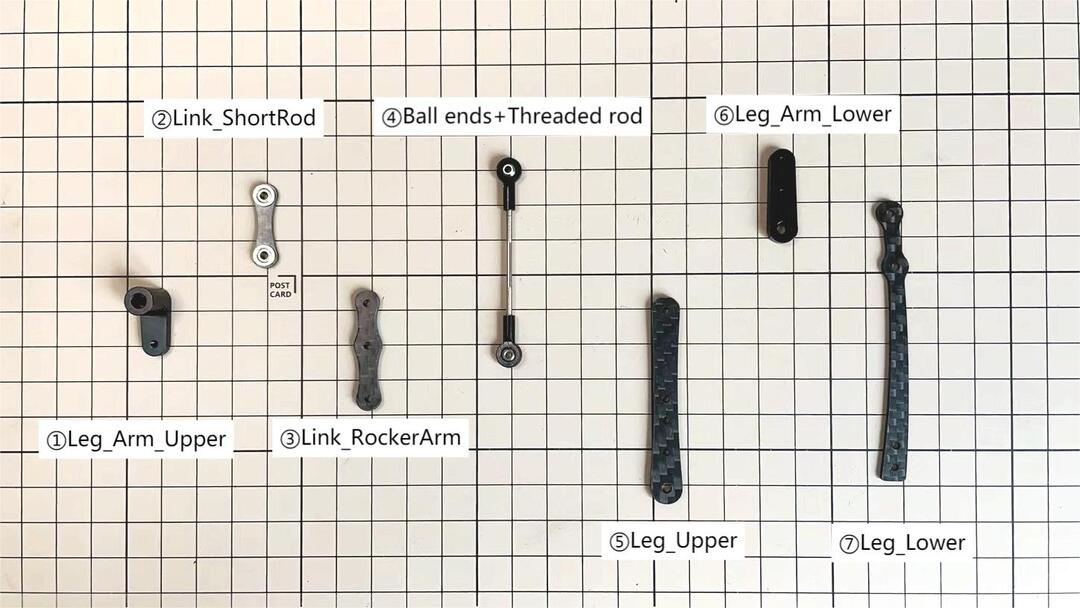
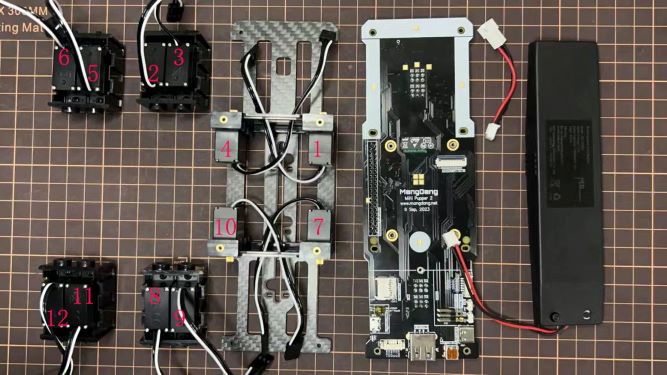
説明の便宜上、以下のようにパーツに番号を振りました。
①と②の組み立て


②の内側のベアリングの両面は異なります。

②と③の組み立て
M2x8mmのネジとM2ロックナットを使用します。ネジを③の底から上に通し、②を通してナットで締めます。③の向きに注意することが重要です。中央の穴の位置をよく確認してください。

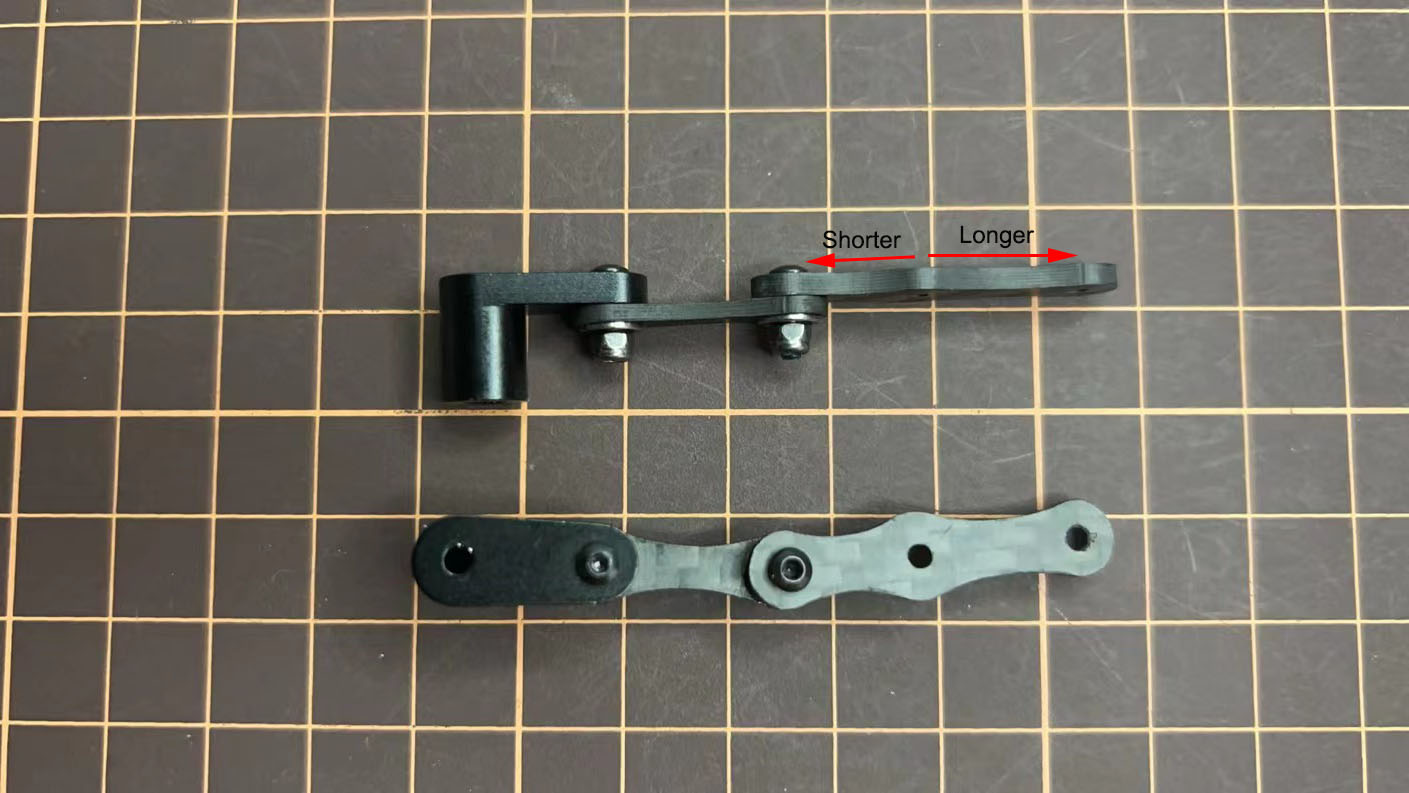
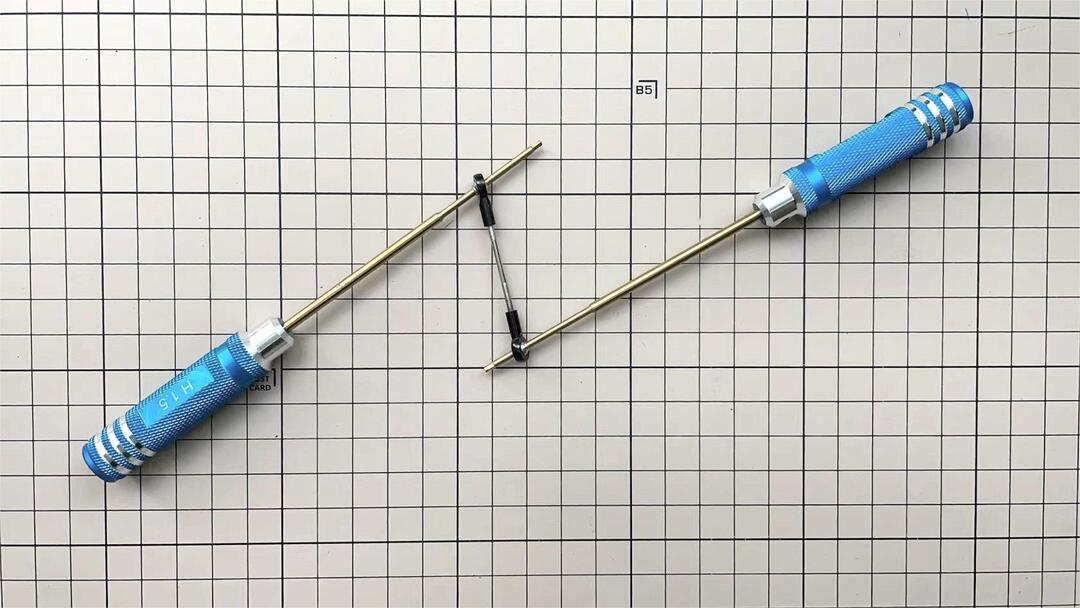
④の長さの調整
④の長さは⑤の長さと一致させる必要があります。長さを調整する際は、2本の長いネジを使用すると長さを合わせやすくなります。長さを調整したら、すべて分解します。

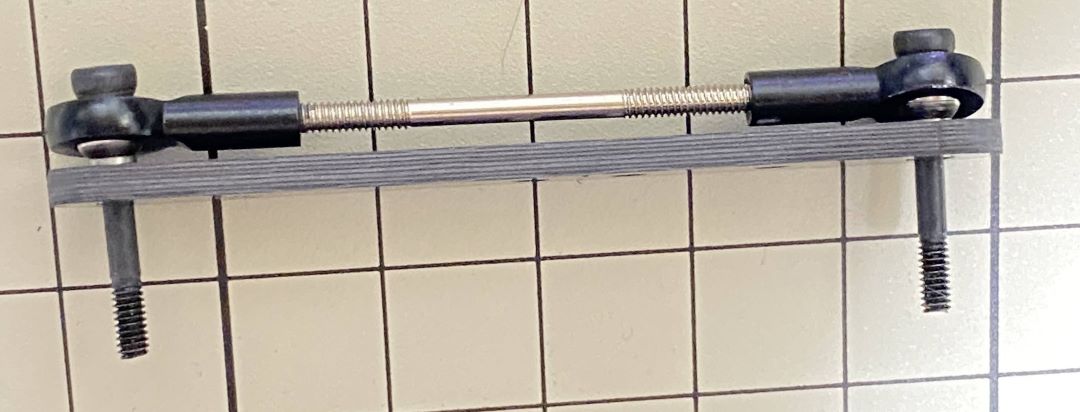
回しにくい場合は、2本のドライバーを使用して補助することができます。
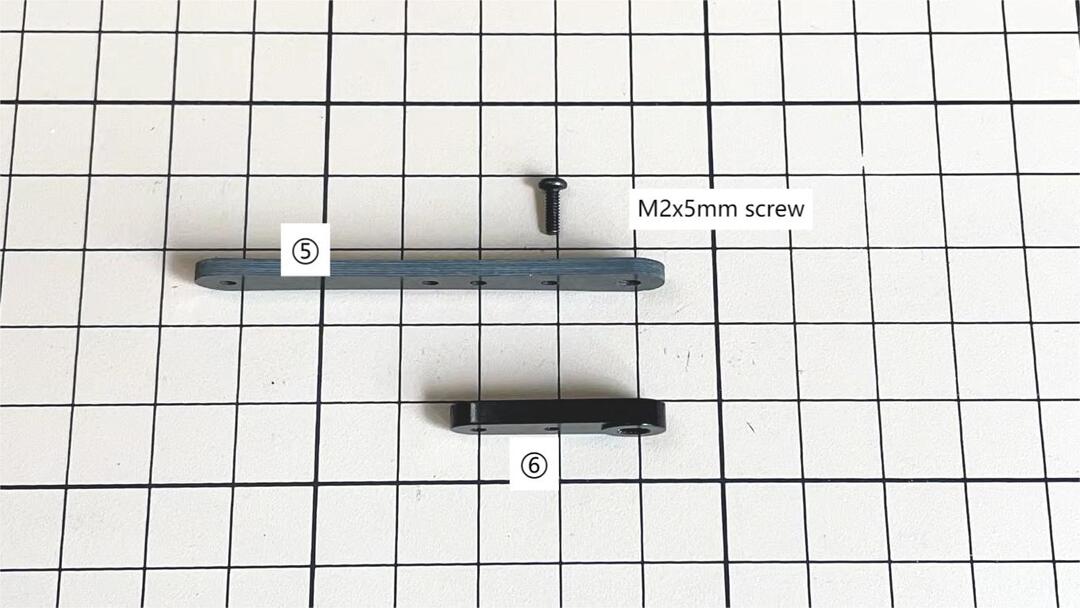
⑤と⑥の組み立て
M2x5mmのネジを1本使用します。まずネジを⑤に挿入し、⑥の穴に差し込んで締めます。⑥の大きな穴は表面を向くようにしてください。


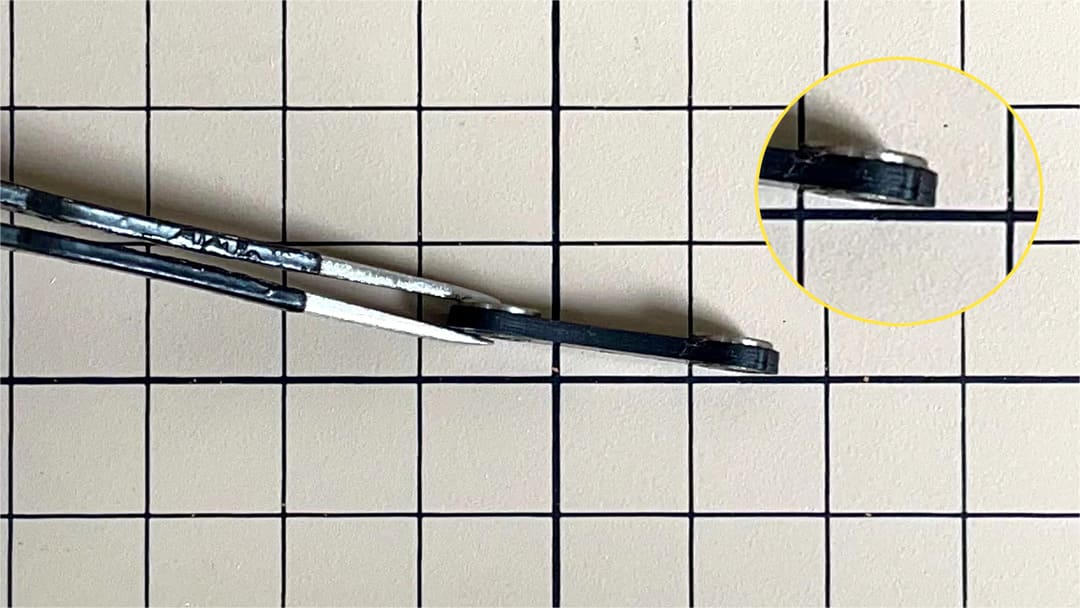
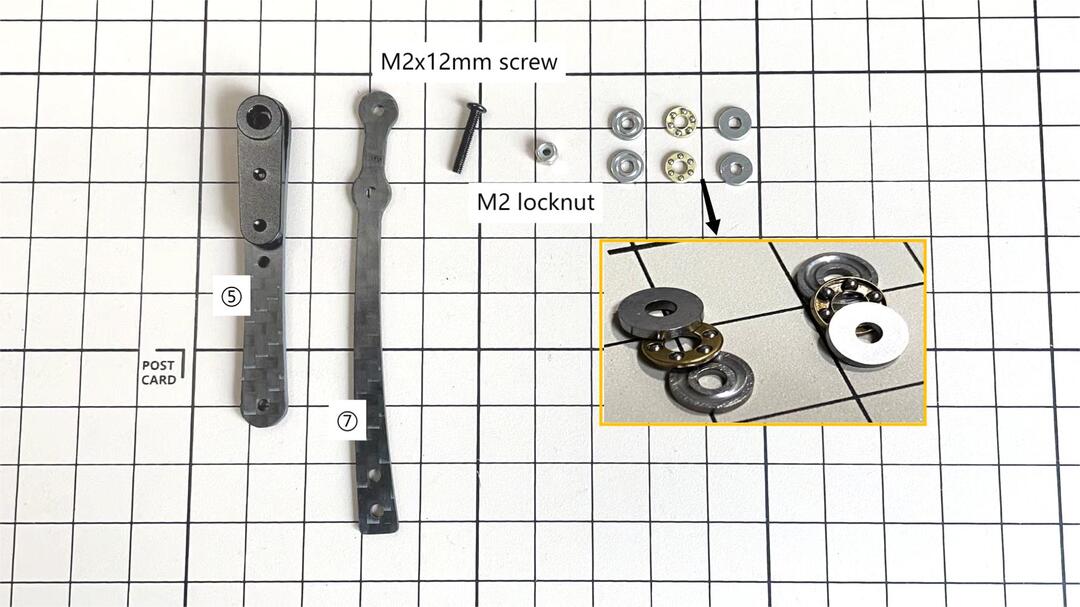
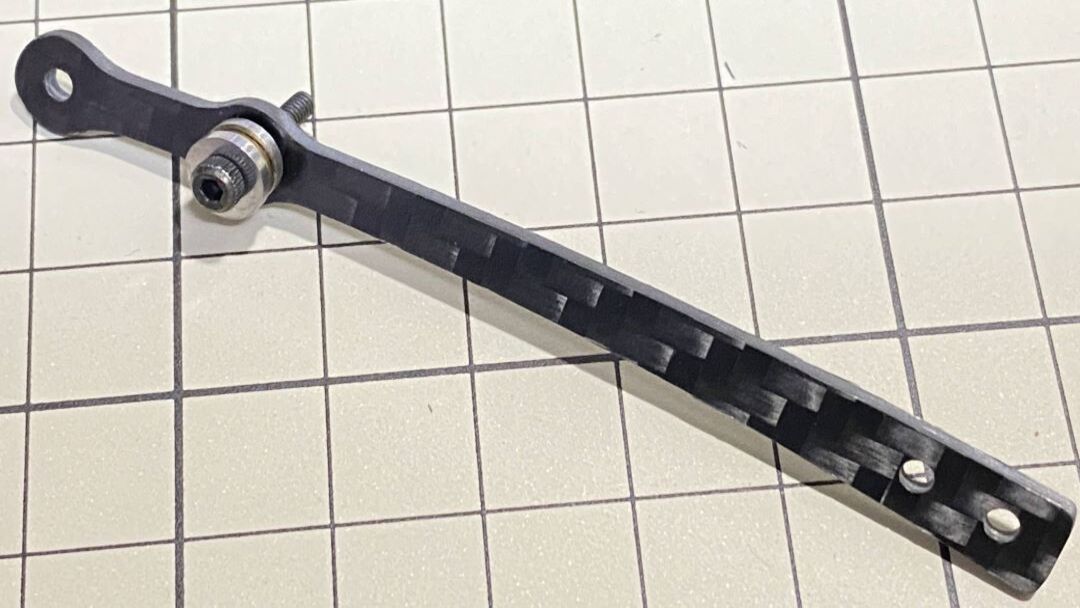
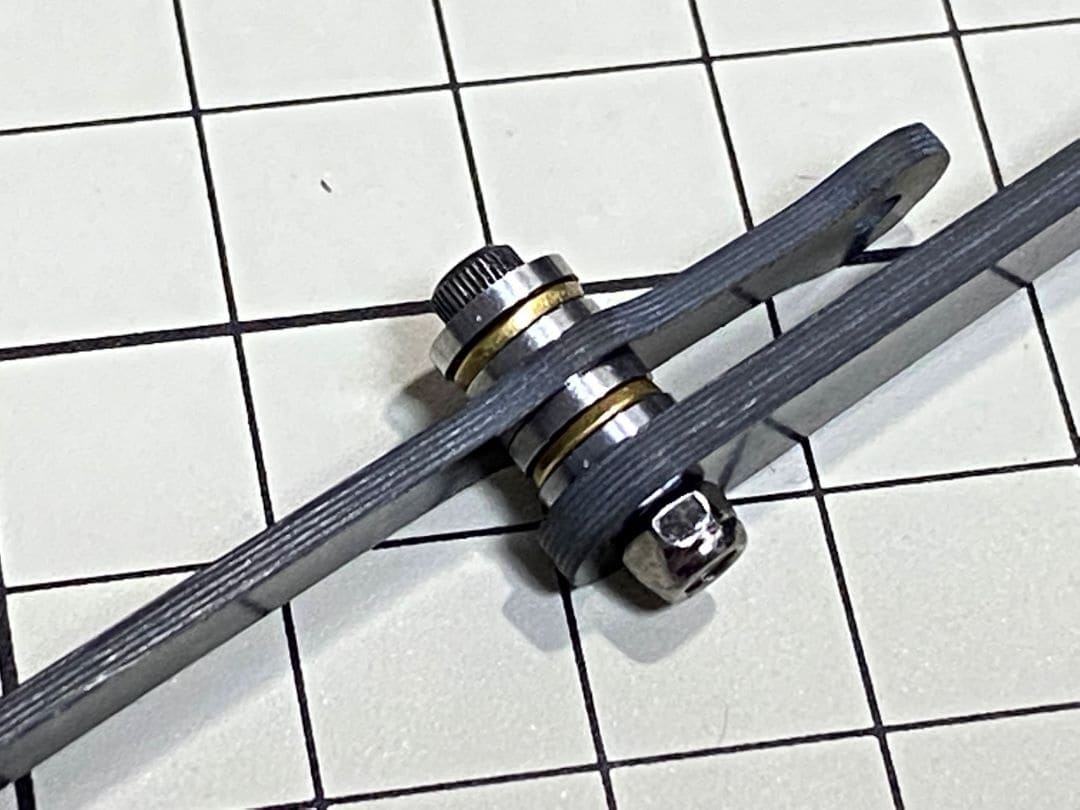
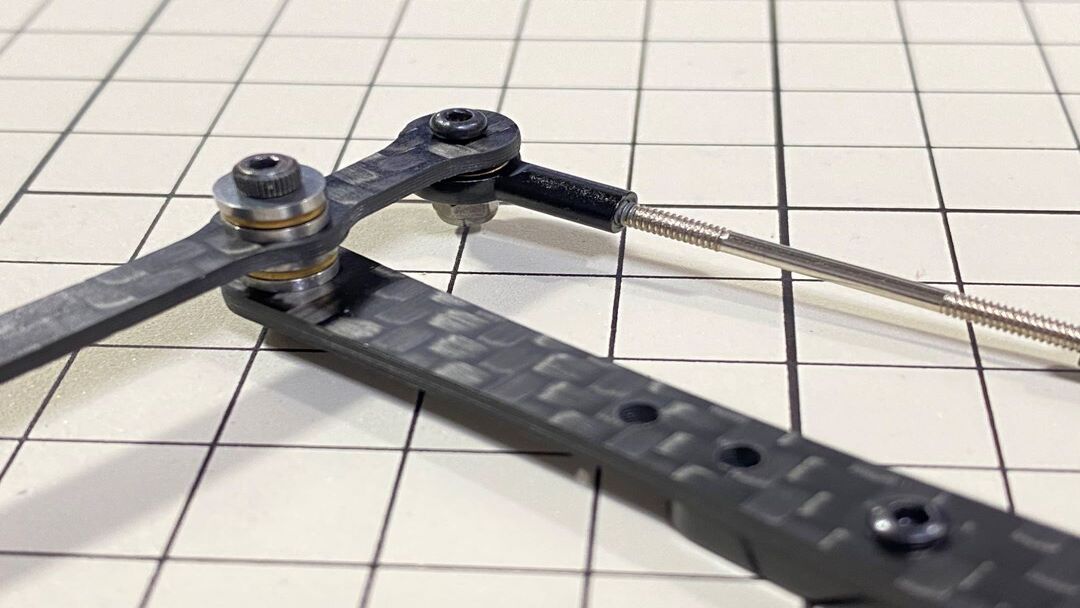
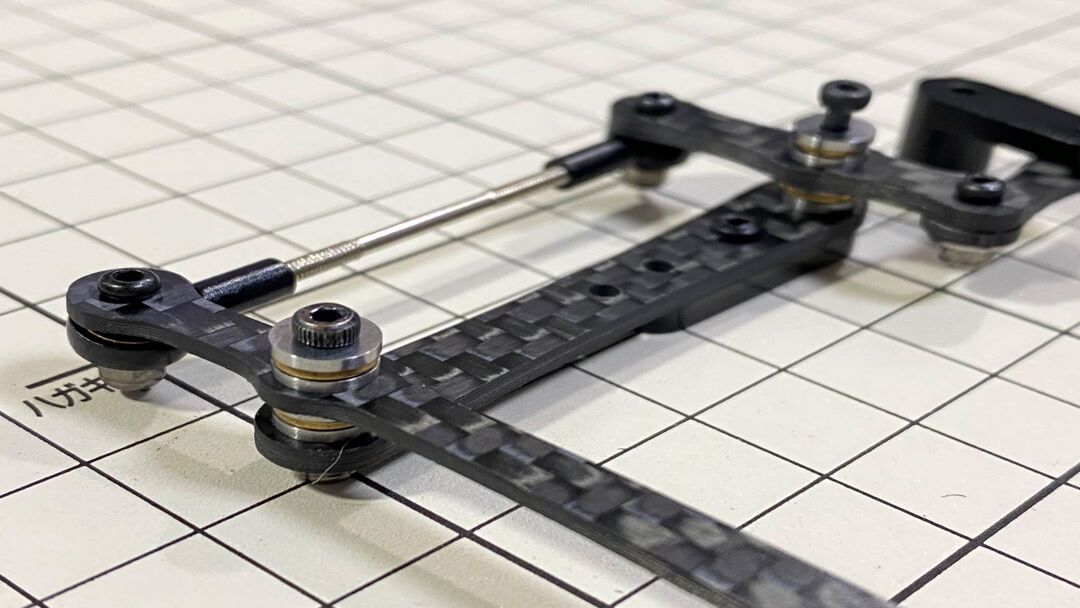
⑤と⑦の組み立て
M2x12mmのネジ、M2ロックナット、2セットのボールベアリングを使用します。各ボールベアリングは3つの部品で構成されており、上下の部品は溝のある面を内側に向けます。ネジを1セットのボールベアリングに通します。次に、ネジを⑦の穴に挿入します。⑦の反りのある側が正しい向きになっているか確認してください。次に、もう1セットのボールベアリングをネジ込みます。最後に、ネジを⑤に挿入し、ナットで締めます。

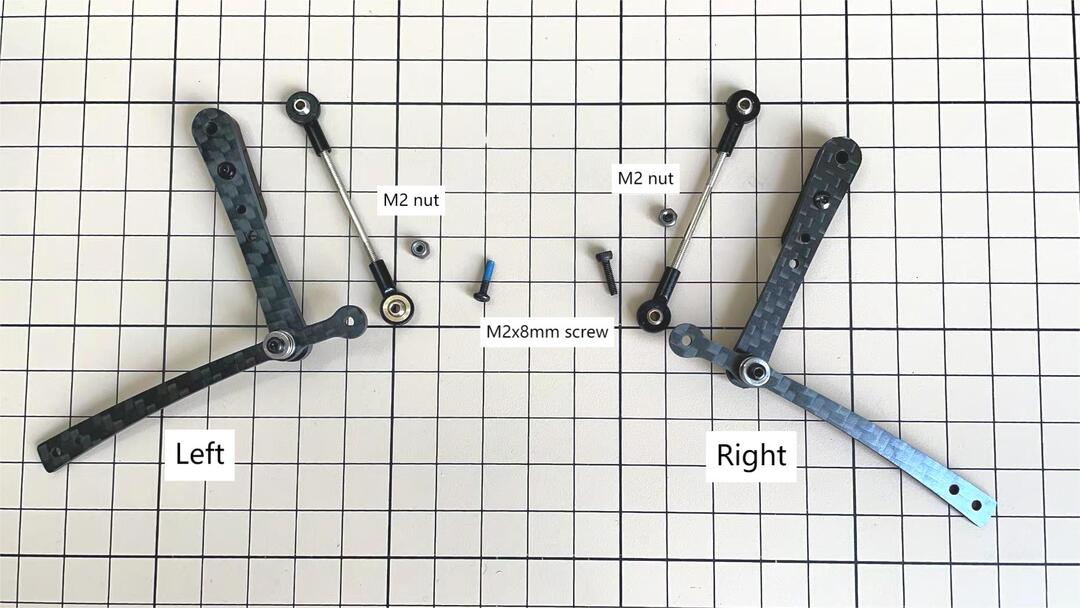
④と⑦の組み立て
M2x8mmのネジとM2ナットを使用します。ネジを⑦に挿入し、④を通してナットで締めます。④の前後の向きはどちらでも構いません。
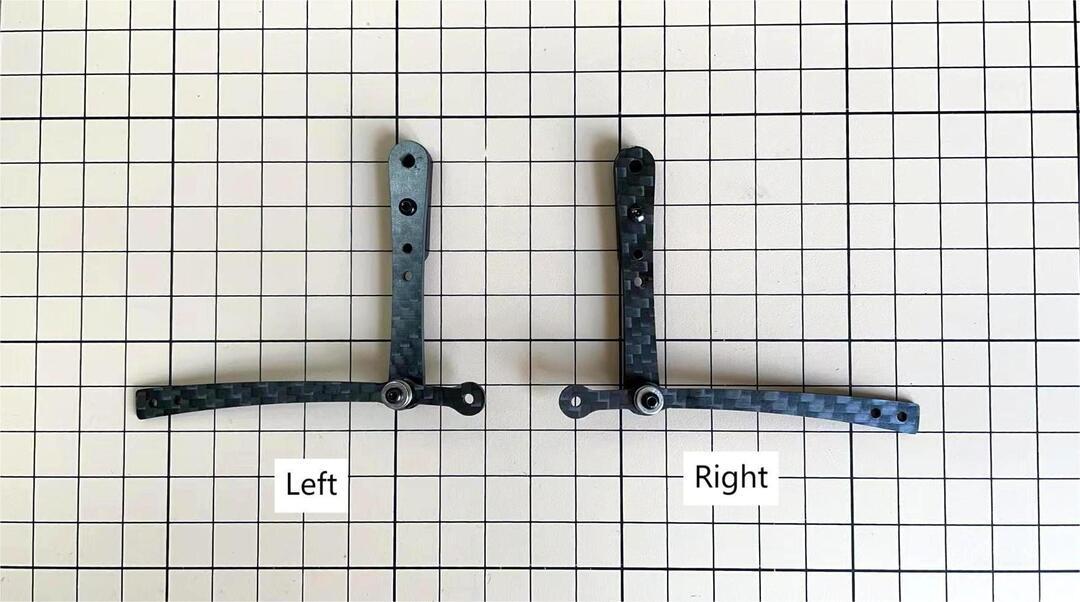
左右の脚

③と④の組み立て
M2x8mmのネジとM2ナットを使用します。ネジを③に挿入し、④を通してナットで締めます。
左右の脚

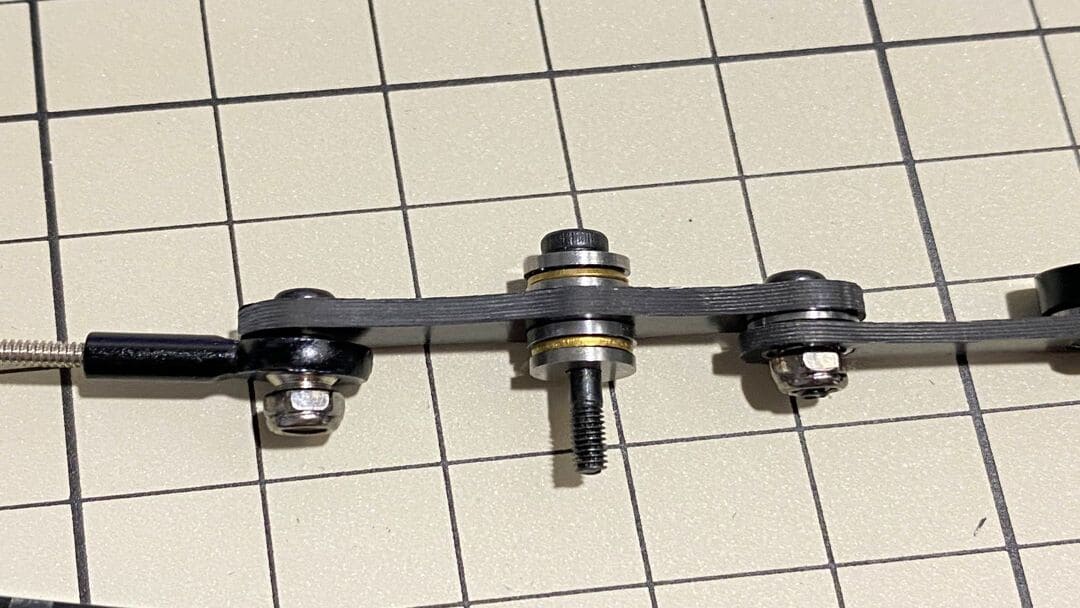
③と⑤の組み立て
M2x14mmのネジと2セットのボールベアリングを使用します。ネジをベアリング、③、ベアリング、⑤の順に通します。この時点ではネジは固定しませんが、次のステップでサーボを取り付ける際に締めます。

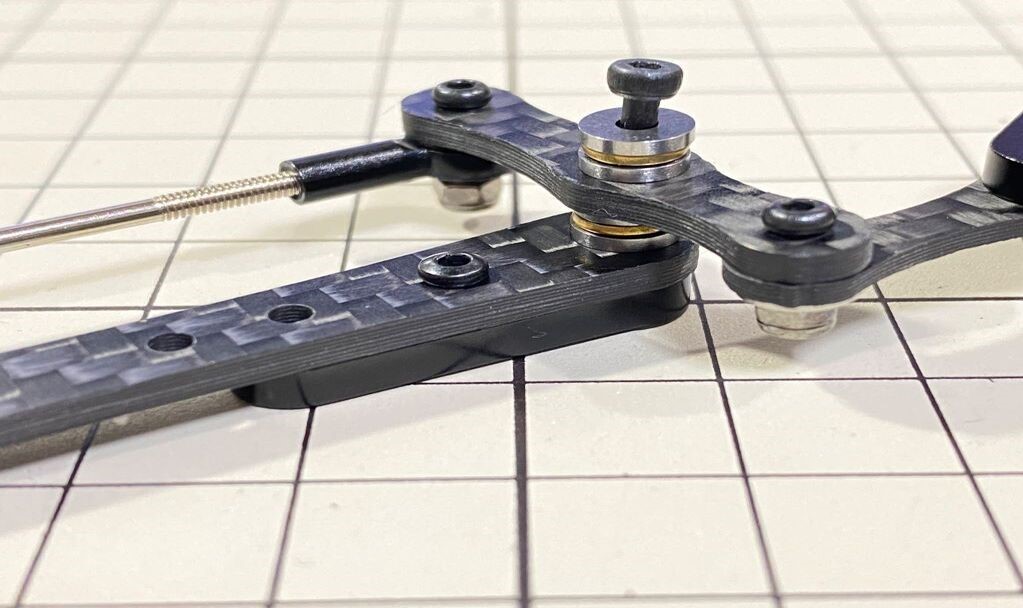
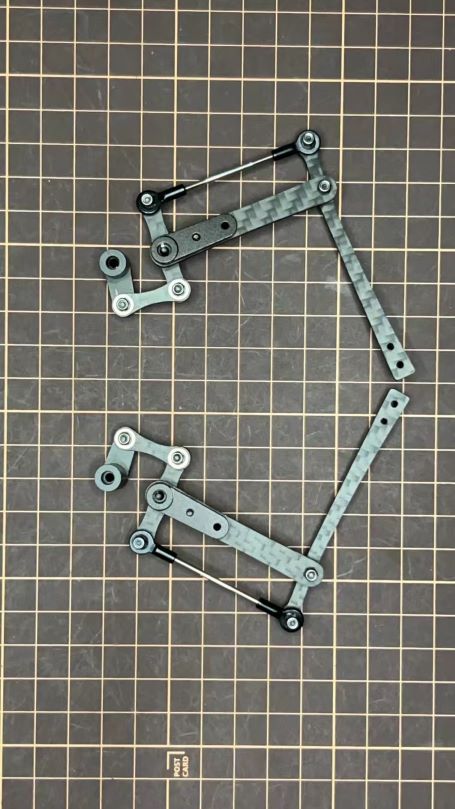
右脚の完成
これで右側の脚が1本完成しました。様々な角度から見た写真を示します。左脚は右脚と対称になるようにします。

反対側
Step 3.2 4本の脚

Step 3.3 ロックタイト
ミニぷぱをしばらく動かすと、一部のネジやナットが緩むことがあります。必要に応じて確認して締め直す必要があります。その仕組みを理解しておくと役立ちます。
※ 初めてのユーザーには、最初はロックタイトの使用をお勧めしません。十分な経験を積んでから使用してください。
※ ロックタイトはナットの緩みを防ぎますが、緩みが気になった時に締め直すだけでも良いため、必須ではありません。

下の写真のように、一部のネジも接着剤で固定します。

4. ディスプレイと前面フレーム
ディスプレイの保護シートを剥がします。ディスプレイの端にある薄いフレキシブルケーブルを折り曲げます。ボードとディスプレイを本体に取り付けます。

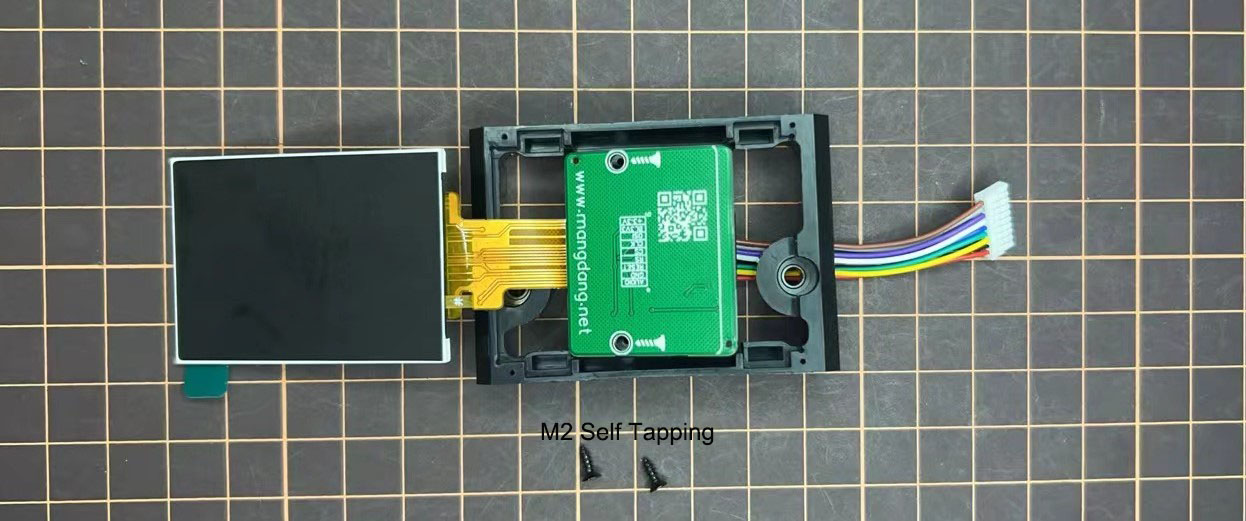

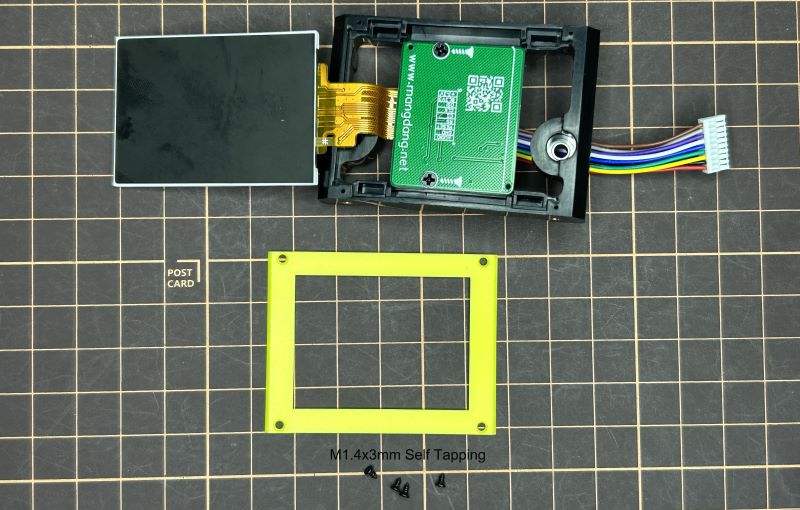
ディスプレイを取り付ける際は、棒を使ってフレキシブルFPCケーブルを優しく押し、できるだけ奥まで入れることができます。このFPCケーブルを180度に曲げないでください。


5. ボディフレームと脚の組み立て
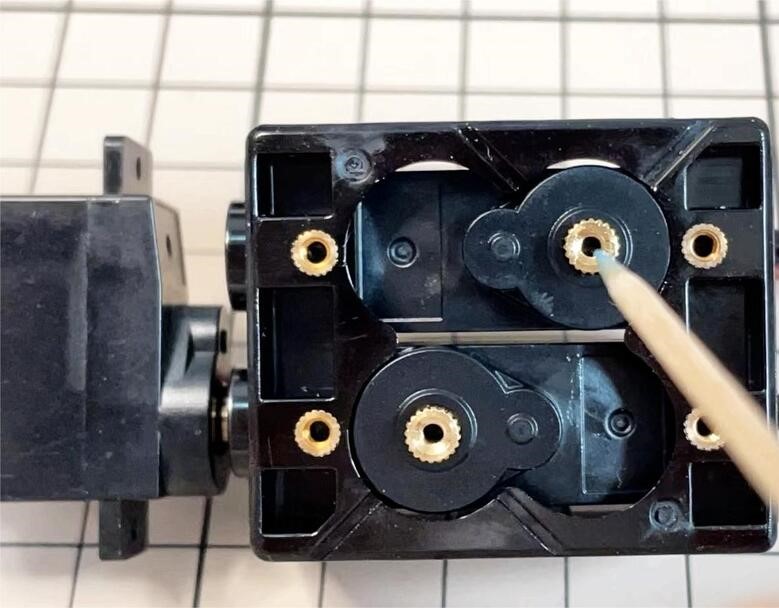
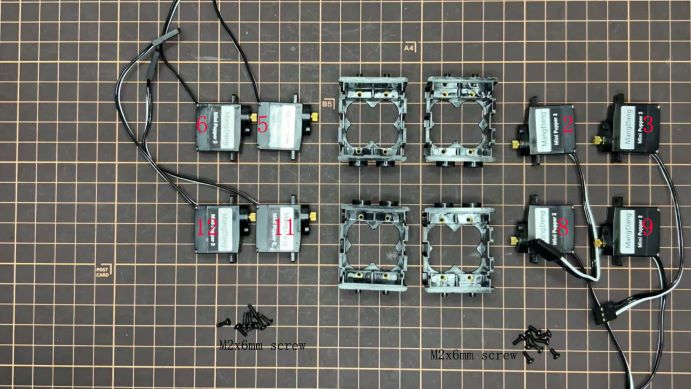
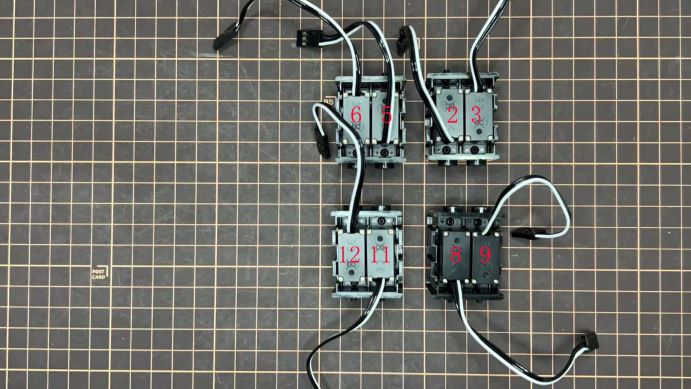
サーボIDの設定方法については、上部のビデオを参照してください。
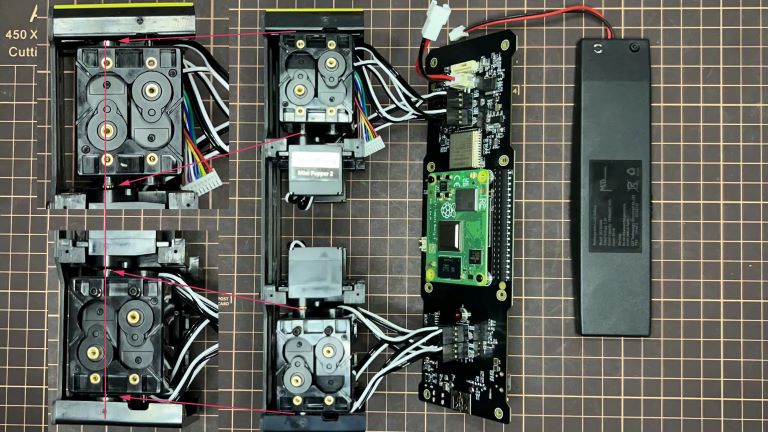
各サーボの位置については、以下の写真を参照してください。

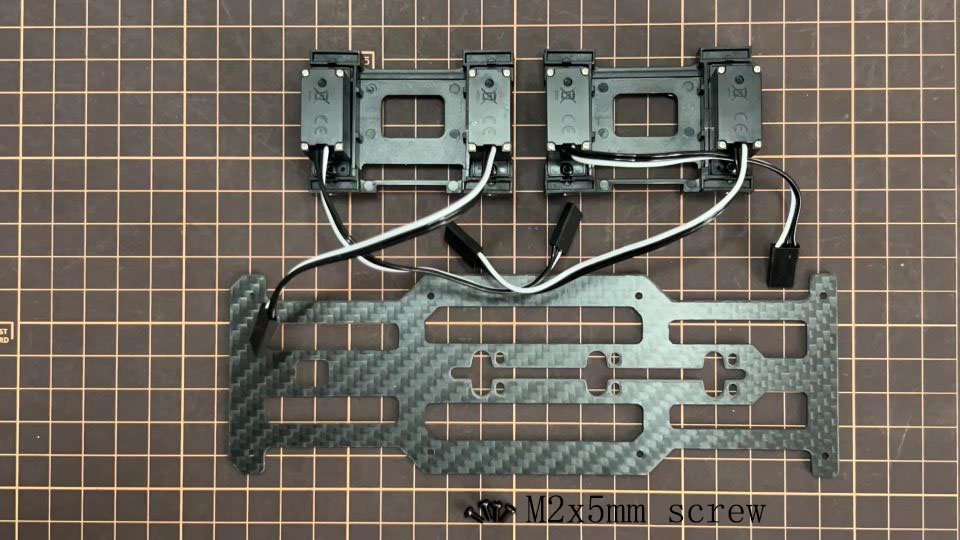
Step 5.1 本体中央部品
No.1, 4, 7, 10のサーボを本体中央部品に接続します。
後で分かりやすくするために、この工程でケーブルにマスキングテープを貼り、サーボの番号を書いておくと便利です。
中央部品の向きに注意してください。
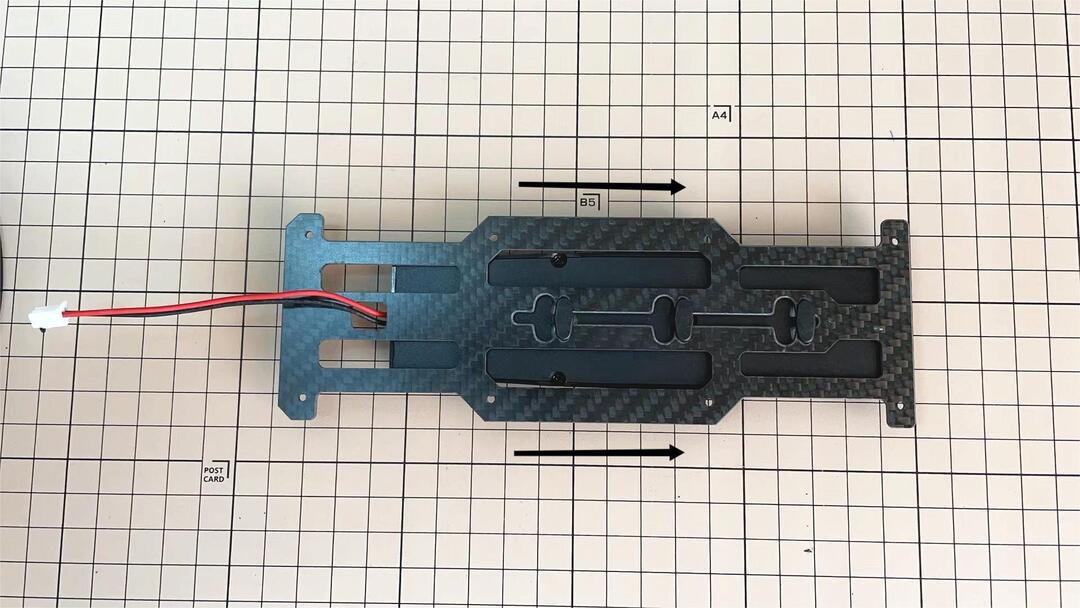
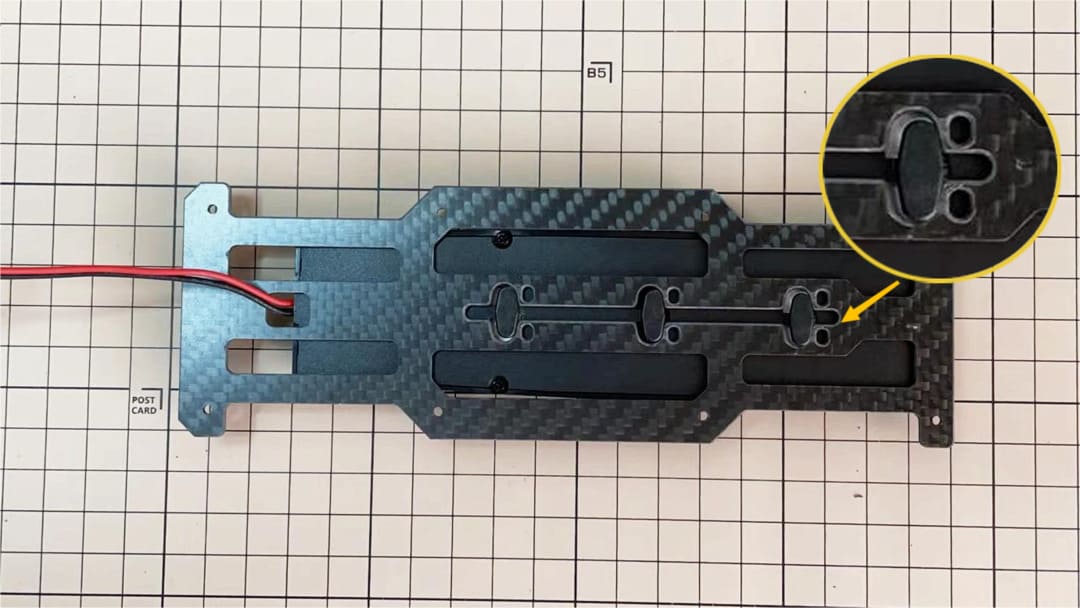
中央部品を底部のカーボンファイバーに接続します
カーボンファイバーの前後の向きに注意してください。
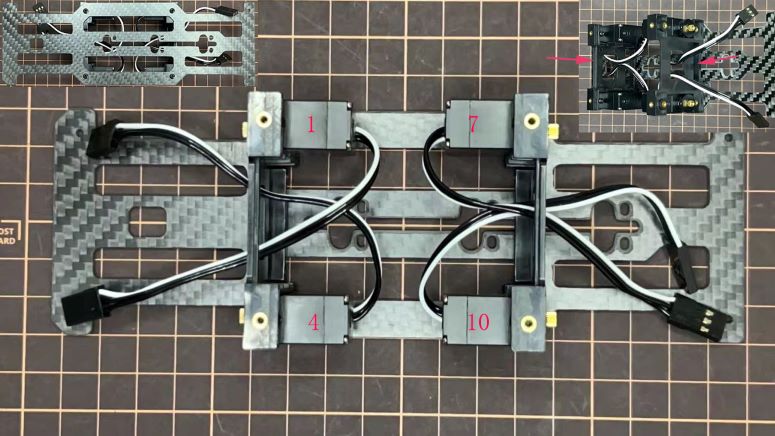
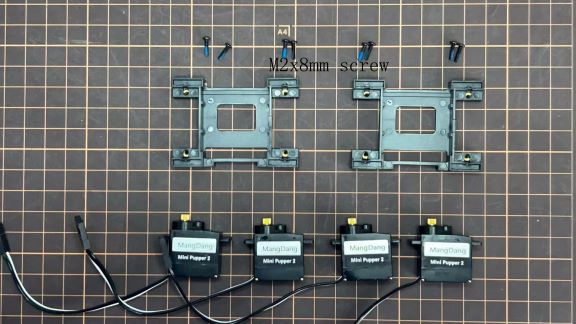
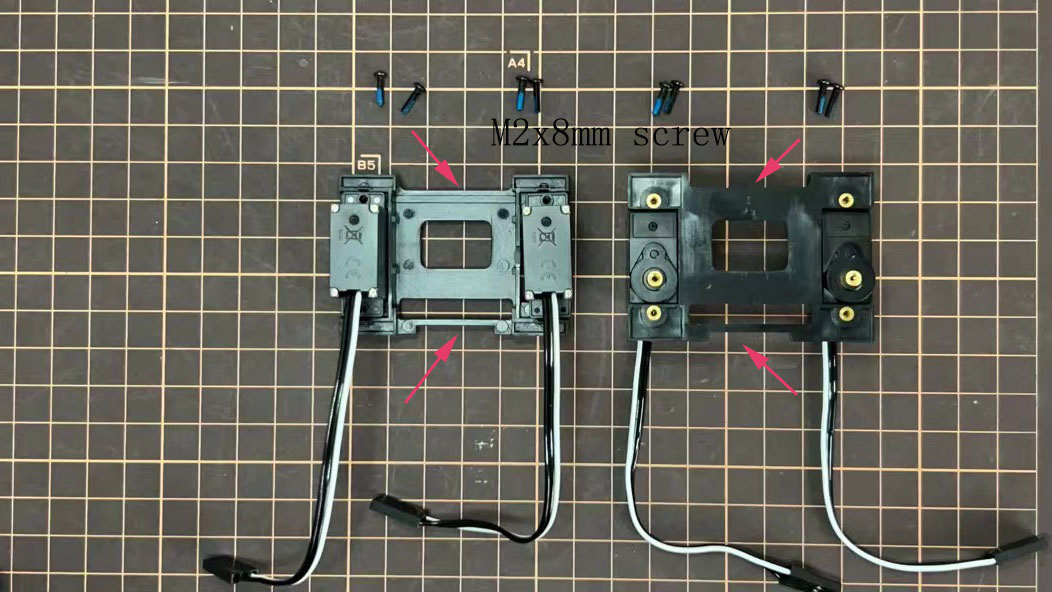
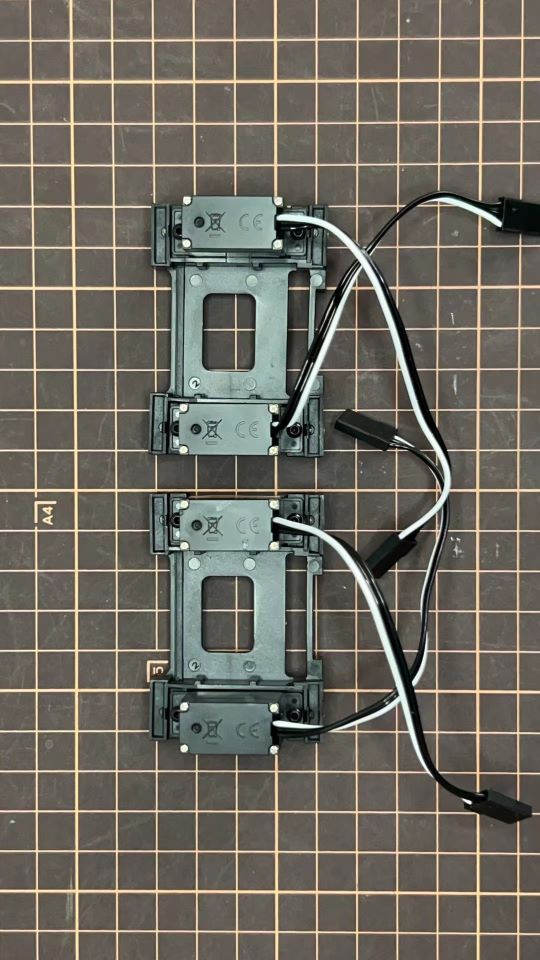
Step 5.2 脚部
サーボの位置を参考にして4つの脚部の組み立てます。
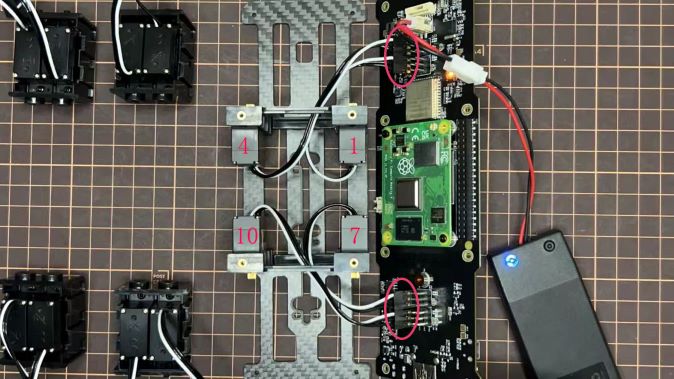
1, 4, 7, 10番サーボが正しい位置にあることを確認します。
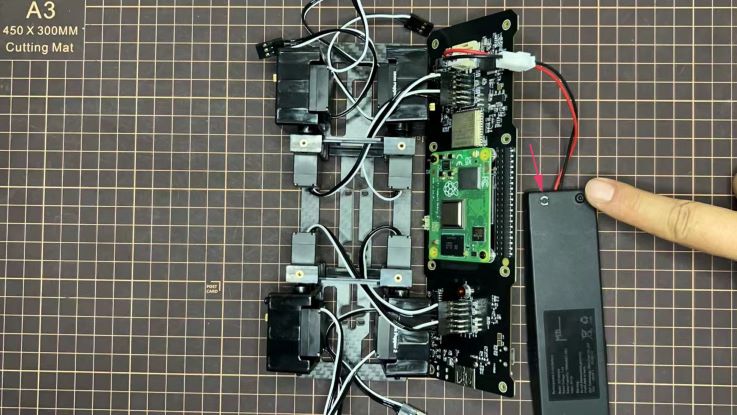
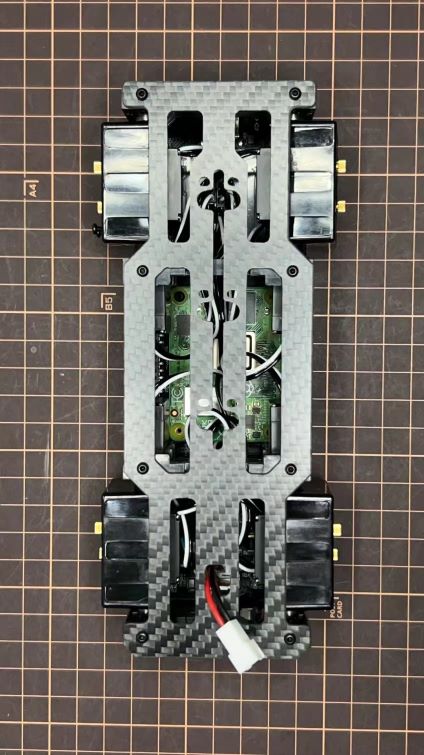
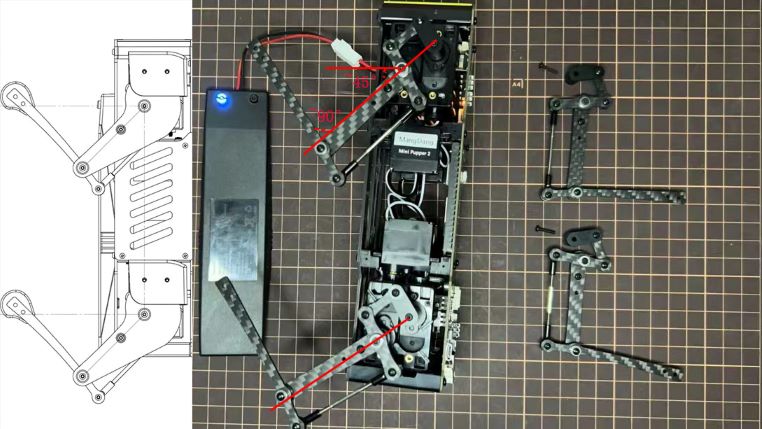
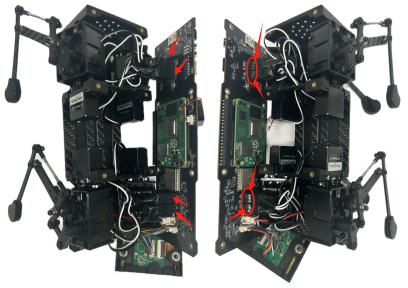
カスタムケーブルを使用してバッテリーを上部の PCB基板に接続し、バッテリー ボタンを 3 秒以上クリックして起動します。

サーボを上部の PCB基板に接続します。サーボ コネクタの方向に注意してください。
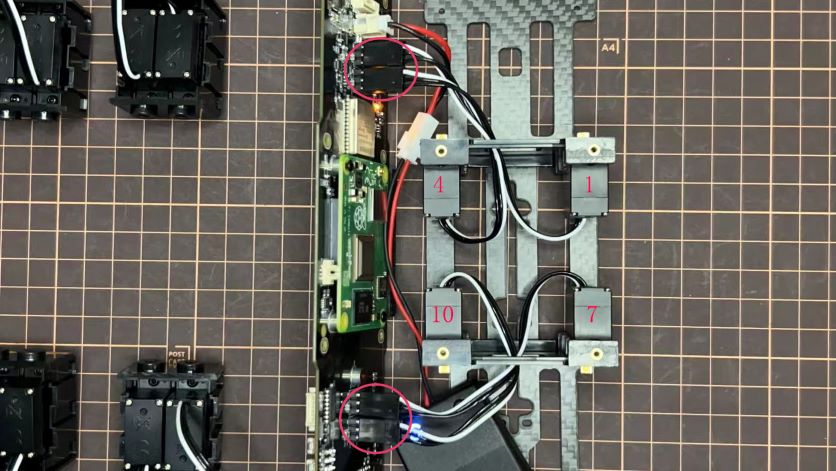
4つの脚部をボディに注意しながら接続します。
この時点でバッテリーの電源を切らないでください。
サーボの位置がすべて正しいことを確認します。
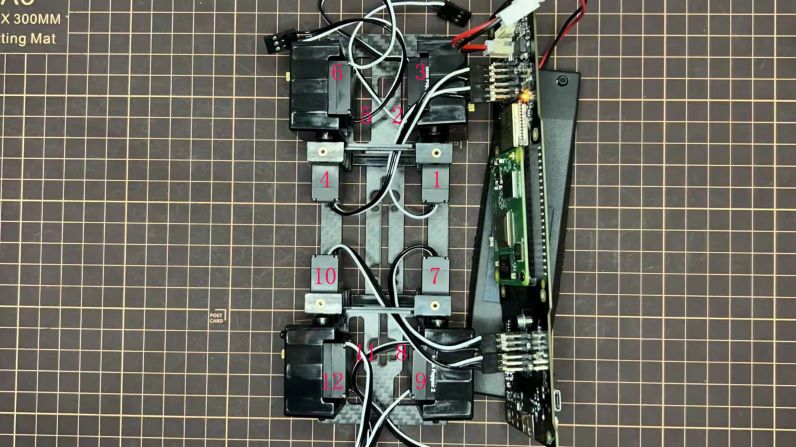
Step 5.3 本体前後のパーツ
バッテリーの電源を切り、本体の前側と後ろ側のパーツを取り付けます。
向きに注意してください。
バッテリーの電源を入れて、脚部パーツがすべて正しい位置にあることを確認し、残りのすべてのサーボを PCB基板に接続したらバッテリーの電源をオフにして先に進みます。
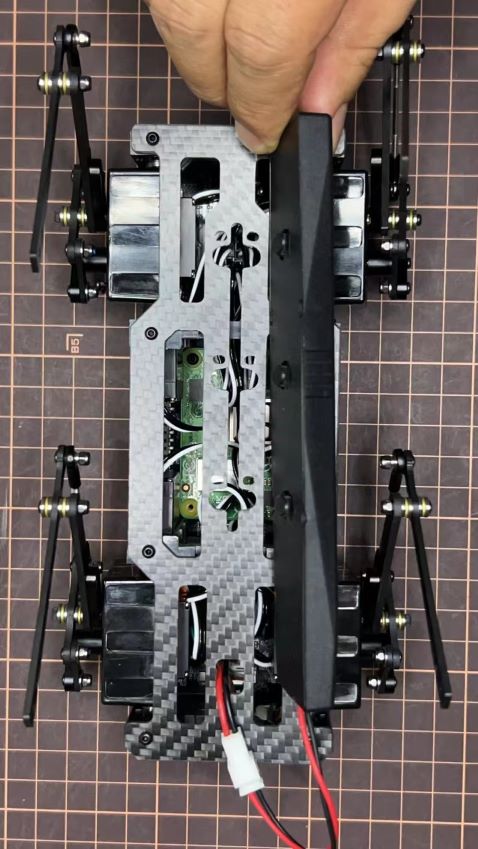
液晶画面のケーブルをPCB基板に接続し、サーボケーブルをまとめます。

上部と下部の板を固定します。
Step 5.4 4本の脚を本体に取り付け
可能な限り理論的にベストな角度になるように注意して取り付けてください。でも心配しないでください。後でソフトウェアを使用して角度を調整できます。

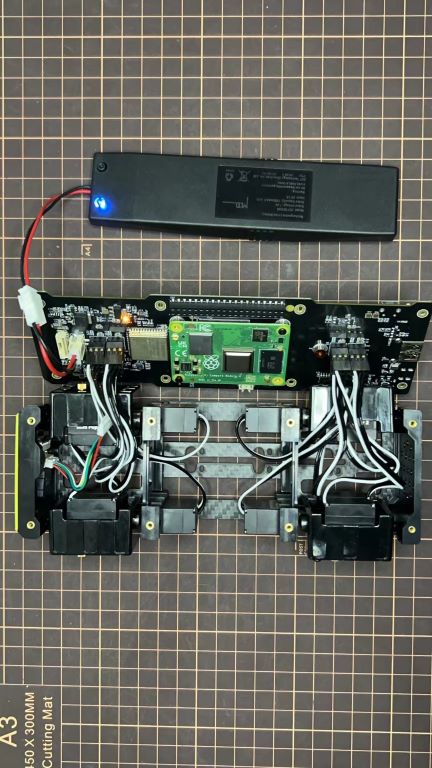
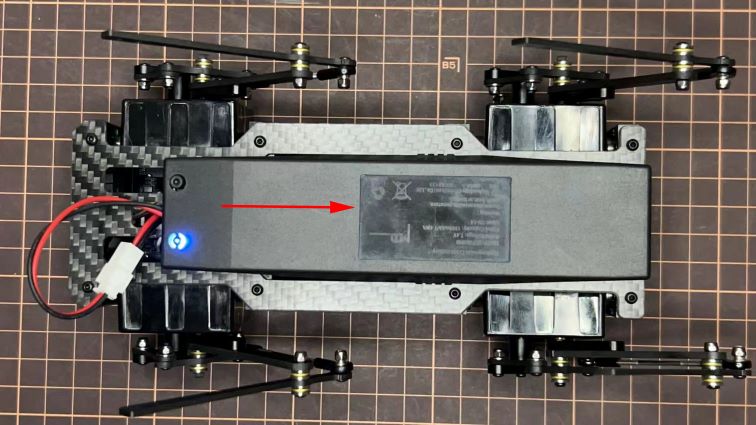
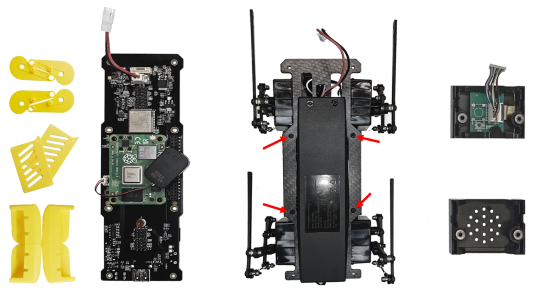
Step 5.5 バッテリーを本体に取り付け
バッテリーを後方にスライドさせて固定します。
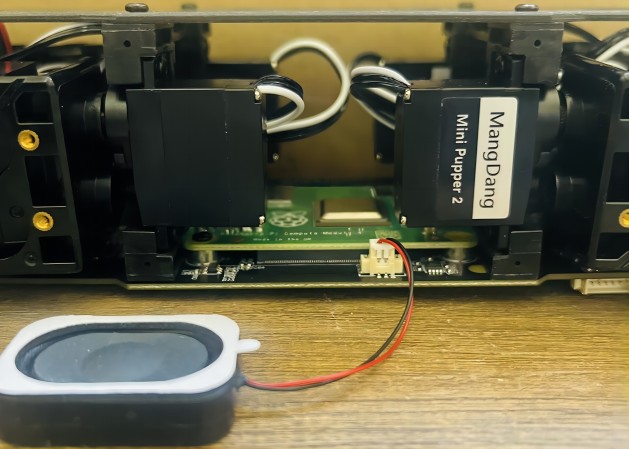
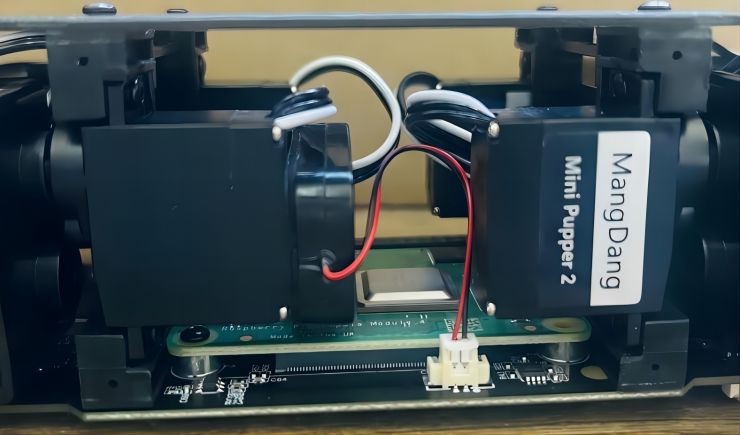
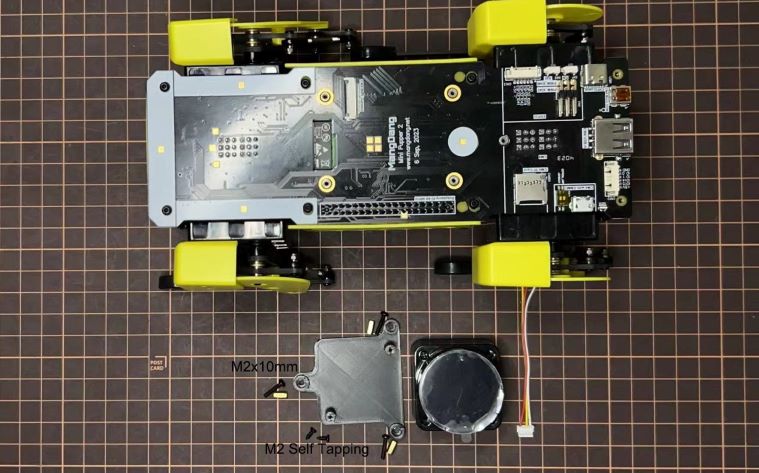
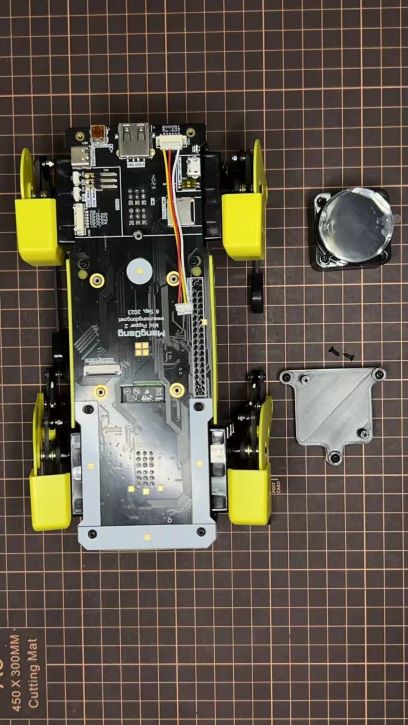
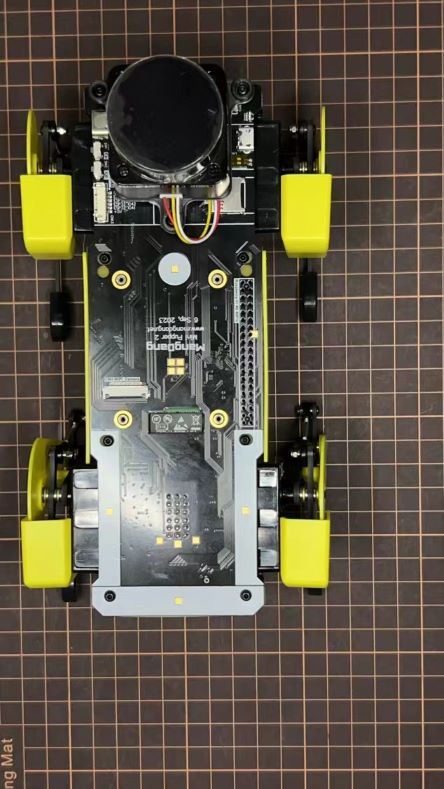
Step 5.6 スピーカーの組み立て
6. スタンダードキットのメインパーツ組み立て
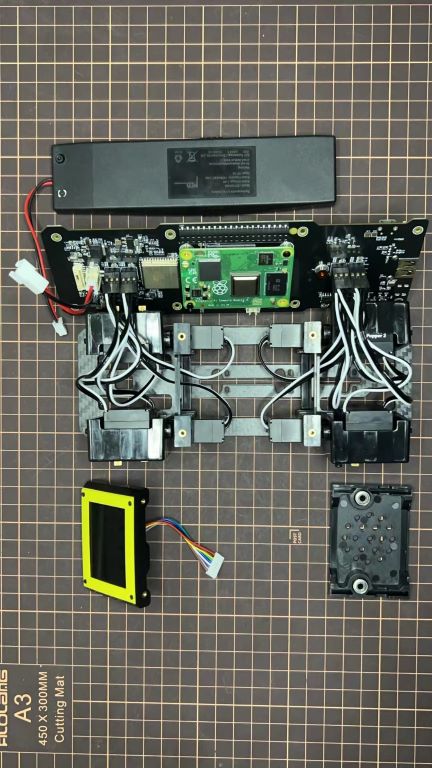
Step 1 準備
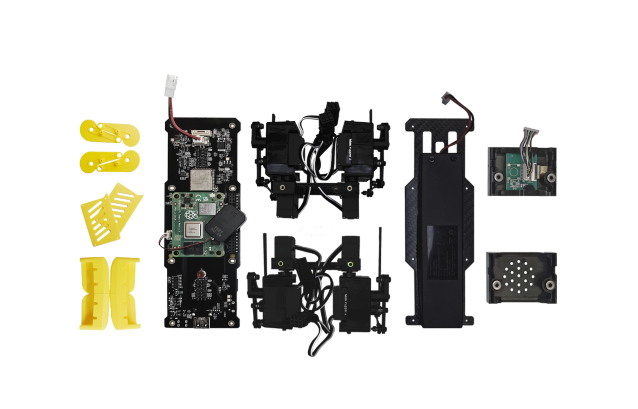
全部品一覧です。
Step 2 底板の組み立て
M2 x 5mmのネジを使用して4本の脚を底板に接続します。
Step 3 上部PCBボードの組み立て
四脚の接続ワイヤーを上部PCBボードに挿入します。LCDスクリーンケーブルをPCBボードに接続します。向きに注意してください。
Step 4 電源ラインの調整
PCBボードの電源ラインを底板の穴に通します。

Step 5 スピーカーの組み立て
M2 x 5mmのネジを使用してPCBボードと底板を固定します。
7. カバー部の組み立て
以下のビデオクリップを参照してください。
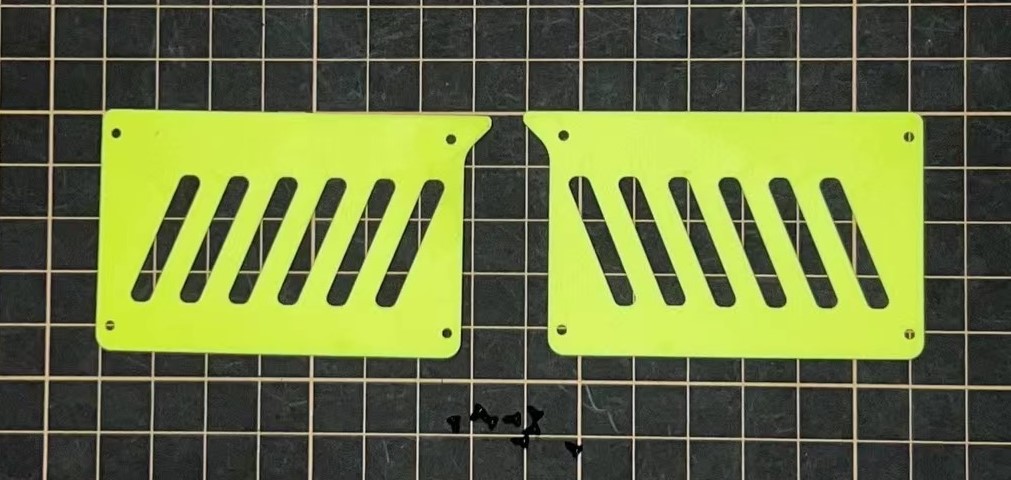
Step 1 本体のサイドパネル

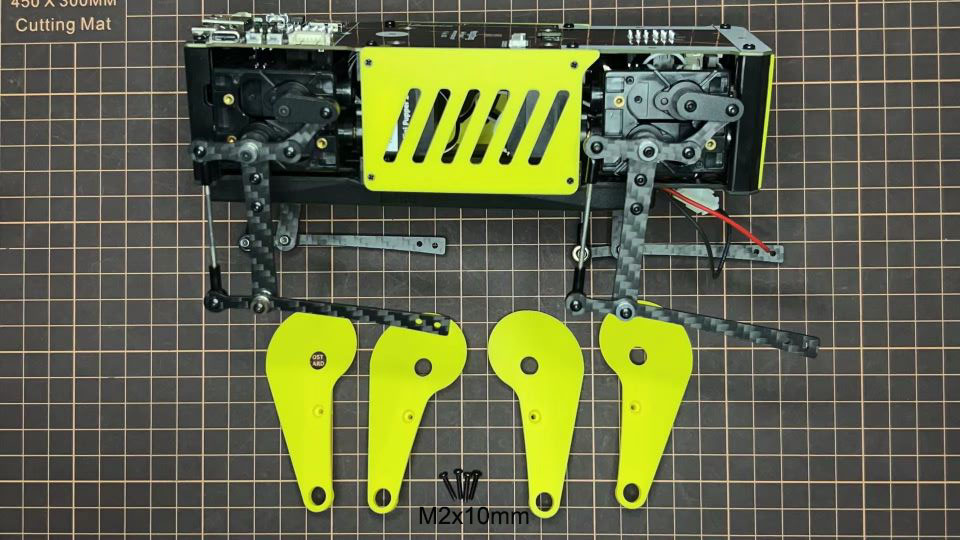
Step 2 もものカバー
M2x10mmの皿ネジを4本使用します。
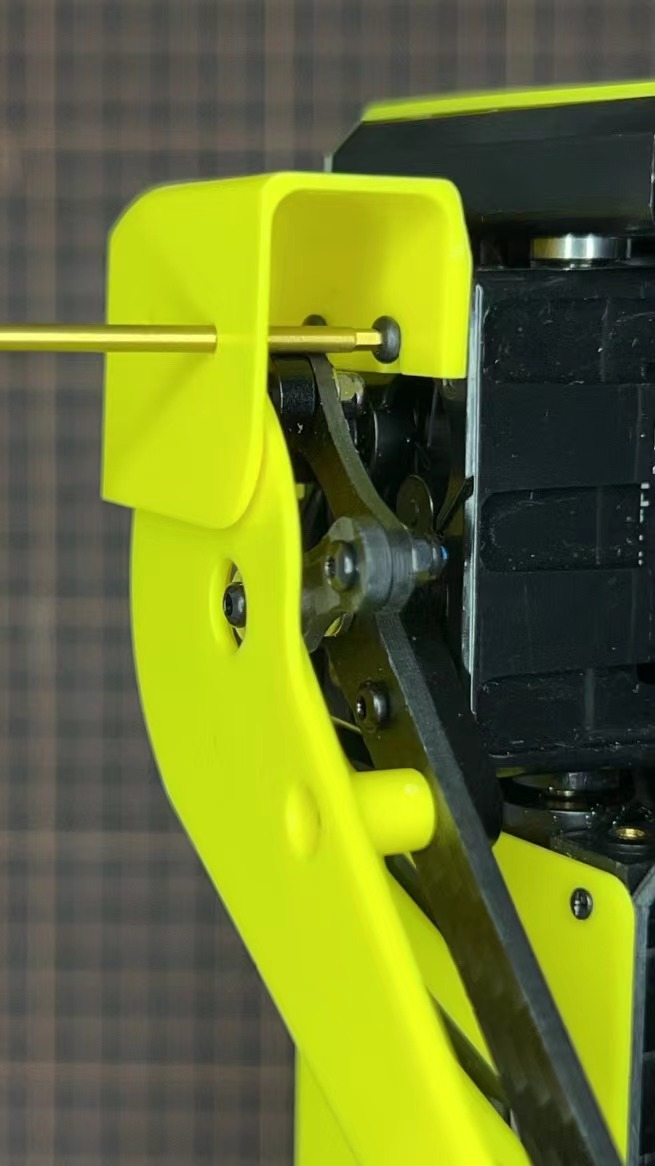
Step 3 ショルダー
まずネジだけを差し込み、その隙間にショルダーパーツを差し込みます。ショルダーパーツの穴に2mmの六角ドライバーを差し込んでネジを締めます。



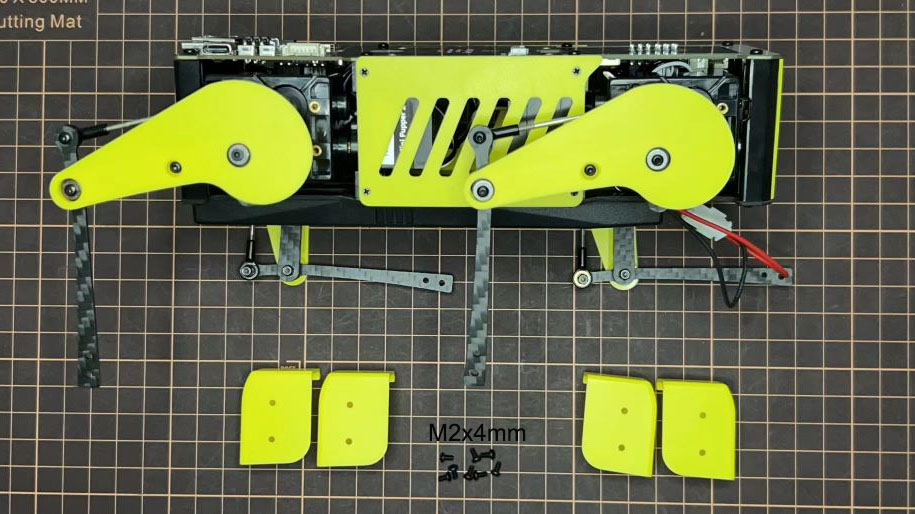
Step 4 足先
足先を取り付けます。

完成!
8. アドオンの組み立て
Step 1 Lidar
If you order the Lidar, the 3D-printed Lidar holder and custom cable will be shipped together. You can also print the holder by yourself using the STL files
3つのホルダーを3Dプリントされた部品に接続します。

カスタムケーブルをPCBボードのLidarコネクタに接続します。
3Dプリントされた部品をPCBボードに固定します。

カスタムケーブルをLidarモジュールに接続し、タッピングネジで固定します。
Step 2 カメラ
ミニぷぱ2は、1つのPiカメラまたはOpenCV OAK-D-Liteカメラモジュールもサポートしています。次のファイルを使用して、ホルダーを自分でプリントすることもできます。Mini Pupper 2 STLファイル