例
1. 外装パーツのカスタマイズ
ミニぷぱはオープンソースプロジェクトです。つまり、必要なものをカスタマイズできます。次のリンクのすべてのファイルをカスタマイズできます。 3D プリント用外装ファイル
LEGO パーツをつなげてみませんか?
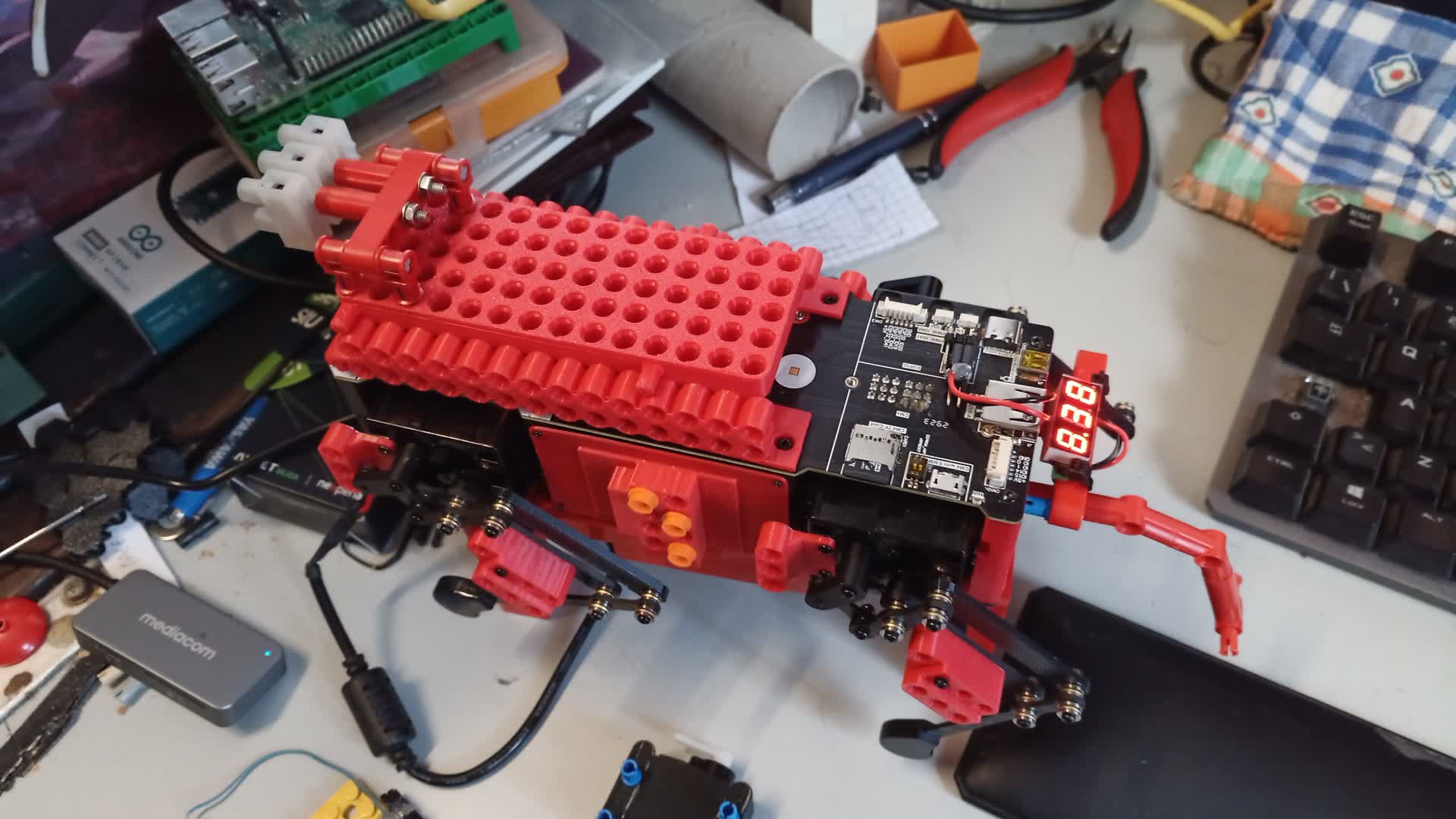
@nisshan_のDIY例
2. 顔アニメーションのカスタマイズ
2.1 前提条件
HDMIディスプレイ
マイクロHDMIケーブル
キーボードとマウス
新しいカスタマイズ画像 (サイズ: 320x240 ピクセル)
2.2 実行
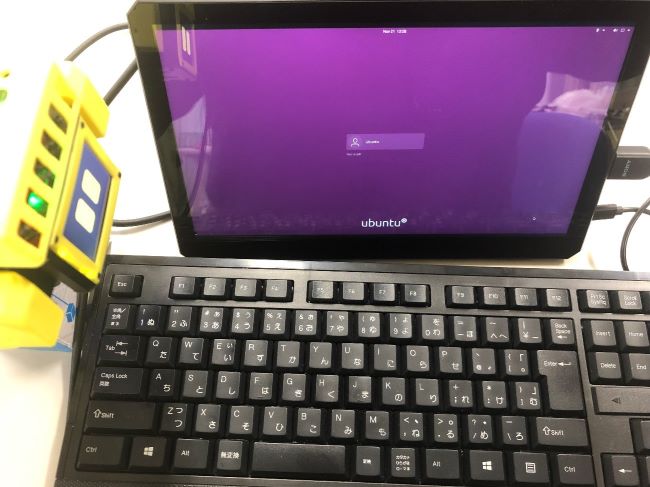
ミニぷぱをディスプレイ、キーボード、マウスに接続します。
Ubuntu ログイン (デフォルトのパスワードは mangdang)
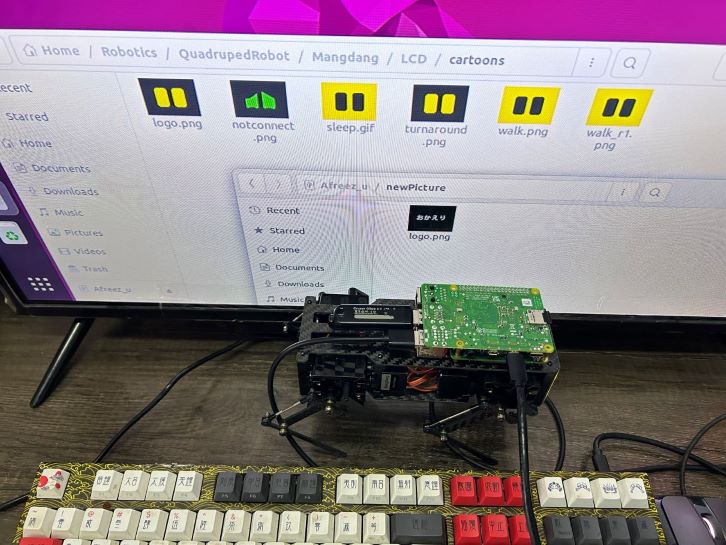
logo.png ファイルをカスタマイズ画像に置き換えます
ミニぷぱを再起動すると、カスタマイズ画像が表示されます。
3. キーボードコントローラー
3.1 ROSを使わないキーボードコントローラー
この機能は、Stanford Pupper 用の Pygame ベースのキーボード コントローラーである PupperKeyboardController プロジェクトに基づいています。
PyGameをインストール
pip install pygame
操作
wasd: left joystick
arrow keys: right joystick
q: L1
e: R1
ijkl: d-pad
x: X
square: u
triangle: t
circle: c
3.2 ROS バージョンに基づくキーボードコントローラー
SLAM セクションを参照してください。
4. WEBコントローラー
Mini Pupper Web コントローラー プロジェクトを参照してください。Mini Pupper Web controller project
5. Mini Pupper PWM サーボの制御方法
ミニぷぱサーボは PWM サーボです。次の図に示すように、1 つのサーボを Pi ボードに接続し、サンプル コードを実行すると、サーボが動きます。コードはこちらにあります。次の図に示すように、Windows または Ubuntu で Python 環境を使用して実行できます。
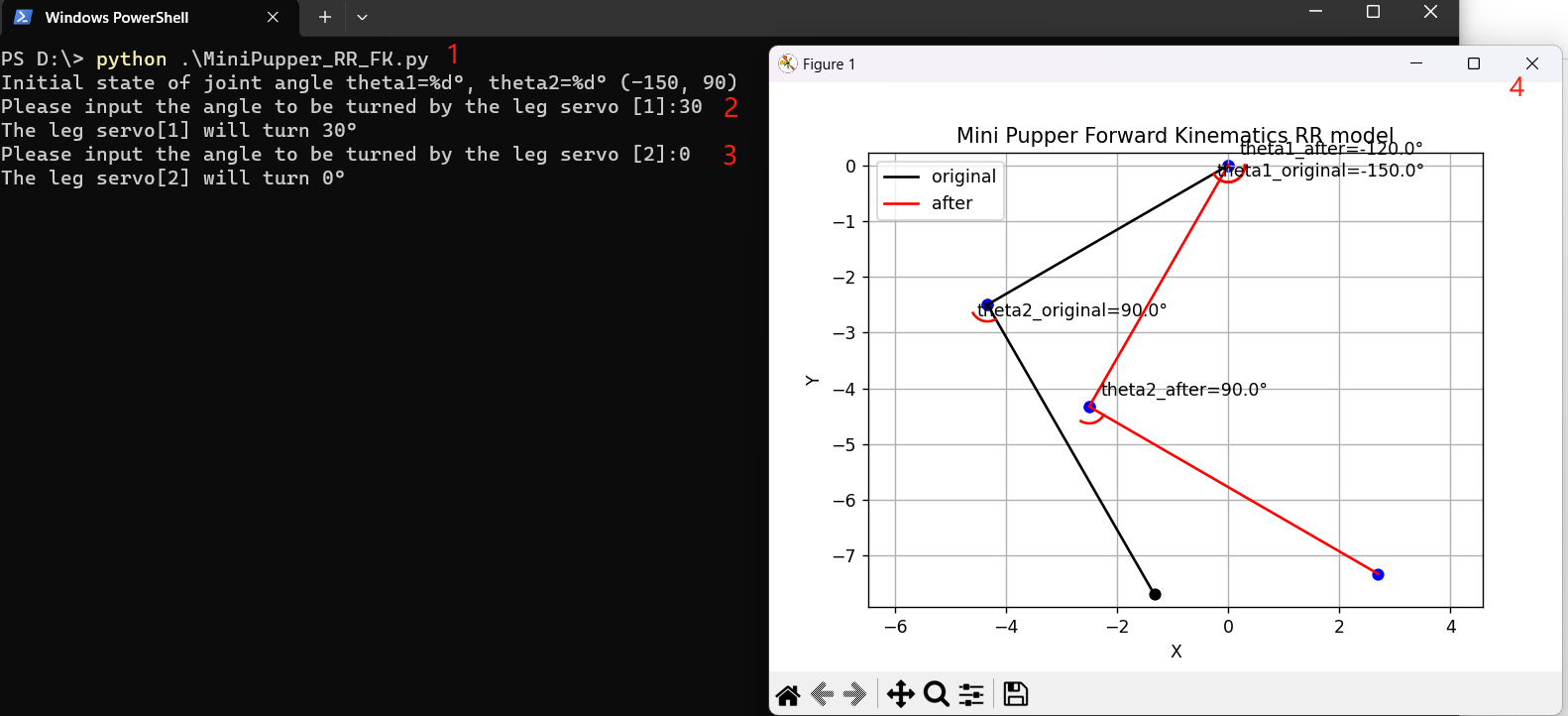
6. 順運動学(Forward Kinematics)
講義
まずはオンラインで順運動学の基礎知識を学んでください。
Stanford Robotics Independent Study の次のビデオ クリップも参照できます。Stanford Robotics Independent Study
フォワードキネマティクス講義
いくつかの点を明確にするためのフォローアップ講義
サンプルコード
ミニぷぱに基づく簡単な順運動学のサンプルコードを用意しました。図に示すように、Windows または Ubuntu で Python 環境で実行できます。次のファイルで試すことができます。こちら
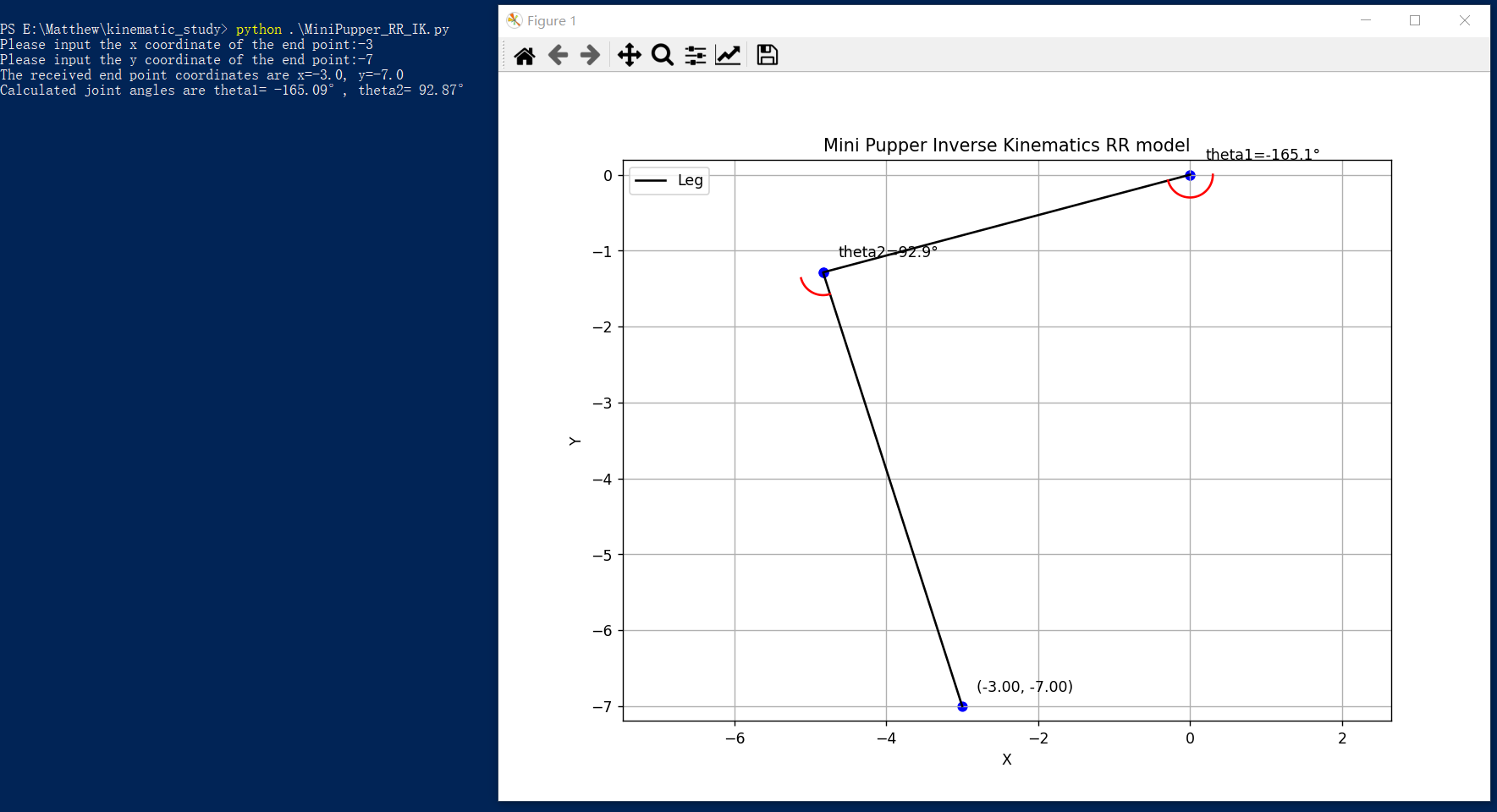
7. 逆運動学(Inverse Kinematics)
講義
Please study the basic knowledge of inverse kinematics online first.
Stanford Robotics Independent Study の次のビデオ クリップも参照できます。Stanford Robotics Independent Study
サンプルコード
ミニぷぱに基づく簡単な逆運動学のサンプルコードを用意しました。図に示すように、Windows または Ubuntu で Python 環境で実行できます。次のファイルで試すことができます。こちら
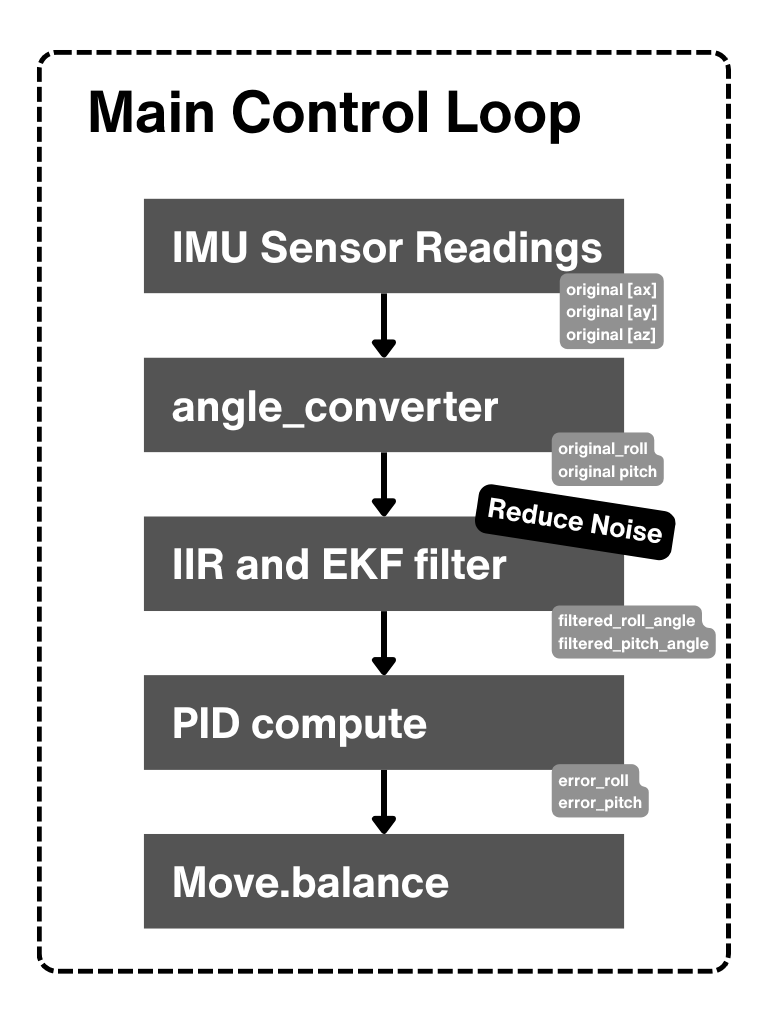
8. PID制御
We prepared PID demo that utilize Minipupper2 IMU to create an auto-balance Mini Pupper, you can try it by
cd StanfordQuadruped
python IMU.Balancing.MP2.py
Try surfing with the pupper! See how it works in the following video clip.
The Demo architecture
9. Docker
9.1 Docker for Pupper
ミニぷぱROS パッケージ用の Dockerfile は、docker-mini-pupper-ros プロジェクトから取得します。docker-mini-pupper-ros project
9.2 ホスト用Docker
ネットワーク経由でミニぷぱとインターフェイスするためのホストコンピュータのセットアップは、mp_host_setup プロジェクトから取得します。mp_host_setup project
10. Scratch program
Will update soon!